初めまして.
HAVRMといいます.
このブログではプログラムやロボット制作など扱うつもりです.
基本的に忙しいので更新頻度はとても低くなると予想できますが,
自分の備忘録としても使える感じで行こうと思います.
なお,いままで以下のサイトでいくつかプログラムを書いています.
あと,昔書いてたFC2のブログはこちら
最近安い3Dプリンタも購入したのでそれについても書こうと思います
初めまして.
HAVRMといいます.
このブログではプログラムやロボット制作など扱うつもりです.
基本的に忙しいので更新頻度はとても低くなると予想できますが,
自分の備忘録としても使える感じで行こうと思います.
なお,いままで以下のサイトでいくつかプログラムを書いています.
あと,昔書いてたFC2のブログはこちら
最近安い3Dプリンタも購入したのでそれについても書こうと思います
皆さん
こんにちは,HAVRMです.
今回は引き続きKhadas Edge2について書いていきたいと思います.
前回は開封してActive Cooling KitやIO Moduleの組み立てを行いました.
havrm.hatenablog.com
今回はOSのインストールとタッチスクリーンの試用をやっていきたいと思います.
x122.45(W)x2.71(T)mm 1080ⅹ1920 5インチ斜め タッチスクリーン VIM3/3L/4 Edge-V/Edge2 Captain Carrier Board対応 (5インチ)")
なおスクリーンショットは1920×1080で出力しているものを1137×640に圧縮しているため,少し見にくいかもしれません.
Khadas Edge2にはすでにボード上にeMMC(Proの場合64GB)が内蔵してあり,そちらにOSを書き込むことになります.一応,他のUSBやSDに入れることはできそうですが,SSDを直接(PCIe等)使えるわけではないので容量不足にでもならない限りそのような使い方はしないと思います.
Khadas Edge2ではインストール時にネットワークにつなげられるのなら専用のサービスであるOOWOWを使ってOSをインストールできます.BIOSみたいなものと考えればいいと思います.Raspberry Pi OSがRaspbianと呼ばれた時代のNOOBSと同じような役割を持っています.
ということでここからは実際に作業の方を行います.今回は試しにGPD Pocket 3のKVMモジュールにKhadas Edge2を繋げて,画面表示と入力を行います(SBCに使う目的で買ってから2年たって初めて使います...).
www.gpd.hk
実際の使い心地等についてはまた別途書くと思います.
OS未インストール時に普通に起動してもOOWOWは自動で開かないので,OOWOWを起動するためにはBIOSとかと同じく,起動時にボタンを押しておく必要があり,それが「Function Key」です(下図の⑨,白背景用なのでPC版だと文字は見にくいです...).

CPUがある面を表に,USBがあるサイドを上にしたとき,右側にあるタクトスイッチ3つのうち,真ん中のものになります.
これを電源入れるときからずっと長押しし,RGB LED1(2つあるLEDのうち右側)が緑色に光ったうえでなめらかに明暗が変わるようになれば大丈夫なようです.電源を入れてからのタイミングが結構シビアなので,電源ケーブル刺した後にFuction Keyを押しながらReset Key(上図の⑧,Fuction Keyの上側,強制終了+再起動される)を押すことで簡単に入ることができます.
この時の電源は12V2Aが出せるUSB PD充電器があればいいです.私はUGREENの200W充電器を使用*1していました(すでに商品更新されたみたいで販売されてないですね...).
採用 全ポートPD3.0対応 単ポート100W高出力 PSE技術基準適合】 ノートPC三台急速充電対応 iphone17-8/Galaxy S23-10シリーズ Android Xperia/AQUOS/Macbook M4対応 CD271")
OOWOWの起動に成功した時は起動画面が次のようにロゴの下に「∞wow」と表示されます.

その後OOWOW Wizardが開かれます.初回の場合は「can't boot up any system!」と表示されるようです.

インストール時にはインターネットがいるので,この画面で「Network」を選んで移動します.
操作は矢印キーやTabキーで行い,決定時はEnterでできます.
「Nerwork」に入ると次のような画面になります.

この画面中の「WiFi」に移動すると次のような画面になります.

どうも初期設定ではWiFiがオフ(Disable)になっているようで,「Wi-Fi > Enable」からオンにできるようですが,ルータを検索時にもオンにできるので,そのまま「WiFi Select Connection」を選択します.
そうすると次の画面のようにオン(Enable)にするか聞かれるので,「Enable Wi-Fi」を選択し,ルータ検索結果が出るまでしばらく待ちます.

ルータの検索結果がSSIDで表示されるので,使うルータのSSIDを選択します.パスワードがいる場合はその次の画面でパスワードを入力し「Connect」を選択します.


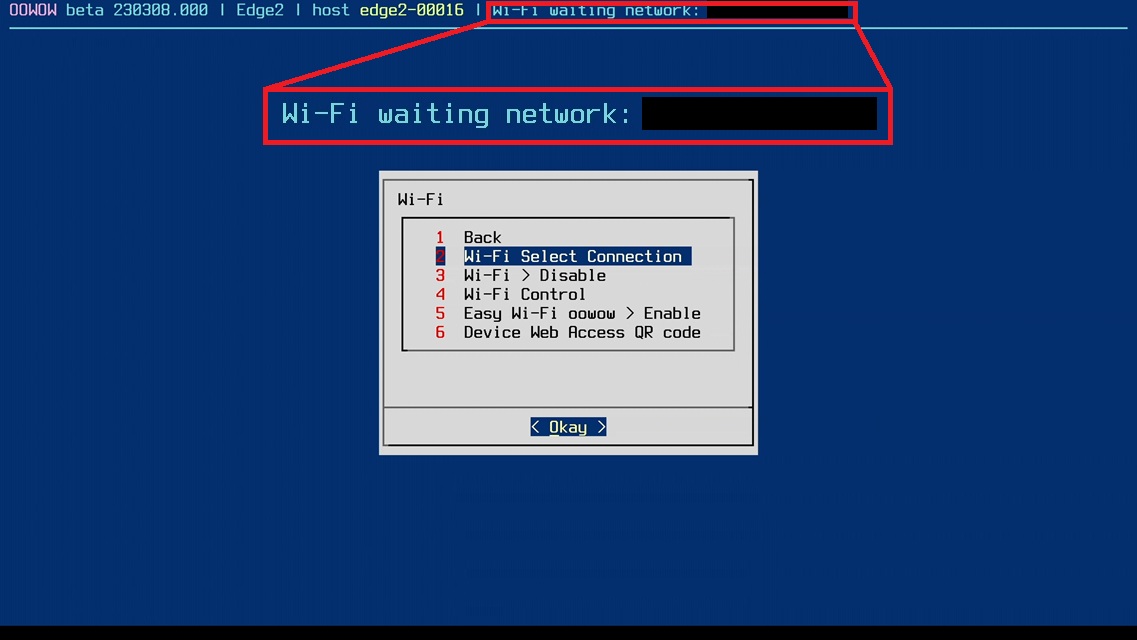
その後,「Wi-Fi」画面に戻りますが,右上の枠を見ると,「Wi-Fi waiting network: (SSID名)」と表示されるので,これが「connected」になるまで待ちます.

この後私は間違えて「Device Web Access QR code」を押してしまいましたが,そこから元の画面に戻ったところ,OOWOWのアップデート確認画面になっていました.
本来はOOWOWの「main menu」から選択するのだとは思うのですが,自動でOOWOWのアップデート画面に移動するようです.作業は2026/4/29に行っていますので,当時の最新版は「250801.000」でした.今だと2026/5/18に公開された「260518.000」のようです.(以下のサイトに最新版を含めたこれまでのOOWOWのバージョンが格納されており,そこで確認しました.)
dl.khadas.com
OOWOWのアップデート画面が次のように表示されるので,「Yes」で実行します.

この後ダウンロード,インストールと進んでいきます.私の環境では,ダウンロードに約10秒,インストールに約3分かかりました.インストール終了後,再起動するか聞かれるので再起動します.

この時,OSのインストールを改めて行うため,再び「Function Key」を押し続けて,OOWOWに入ります(しなくてもいいかもしれませんが未検証です).
再び,OOWOWを起動すると,先ほどと同じOOWOW Wizardが開かれます.しばらく待つと先ほど登録したWiFiに再接続する(右上の欄で確認できます)ので,「Continue」を押します.

そうすると,ネットワーク接続状況が表示されます.WiFiがつながっていれば問題ない(Ethernetを繋げるためにはアダプター等が必要)ので,そのまま「Continue」を押します.

そのまましばらく待つと,勝手にOS選択画面に移動します.ここで好きなOSを選んで「OK」すればOSのダウンロード・インストールが始まります.

ここで「alpine/」や「android-12/」と「/」がついているものはフォルダを示しており,その中にそのOSがまとまって保存されています.私は下の方にあるUbuntu22.04の「edge2-ubuntu22.04-gnome-linux-5.10-fenix-1.6.5-240301.img.xz」(789.6MB)を選択し,インストールを行いました.

このまま「Download」を押すとダウンロードが始まります.私の環境では,ダウンロードに約9分かかりました.
ダウンロード終了後,インストールするか聞かれるので,「Install」を押してインストールを行います.

配信時はxzで圧縮されているのでそれを解凍すると4.7GBになるようです.これをインストールしていきます.私の場合は1分程度で完了しました.
完了したら再起動するか聞かれるので「Reboot」を選択し,再起動をします.

この後はOSを開きたいので特に何もせず,OSが起動するのを待ちます.
Ubuntuの場合,ユーザ名,パスワードの初期値はともに「khadas」です.セキュリティーが甘いので,各自ユーザ名やパスワードを変更して下さい.その際は必要に応じてkhadasユーザの削除をして下さい.なおその過程で再起動等を行うと思います.
OOWOWで設定したWiFiはOS側では保存されていないので,WiFiを改めて設定する必要があります.右上のタブや「Settings」から登録できるのでそこで設定してください.
OSインストール直後はOSファイルが作られた後のソフトウェアのアップデートを適応するため,いつものアップデート・アップグレードを行います.
$ sudo apt update
$ sudo apt -y upgrade
標準だと日本語対応しておらず英語のみなので,日本語を使いたい場合は別途インストール等必要です.
「Settings」を開いて「Region & Language」を選択します.その後「Language」にある「Manage Installed Language」を開き,開かれた「Language Support」画面で「Install / Remove Languages...」を選択します.そこで開かれた「Installed Languages」で「Japanese」を探し,チェックを入れ,「Apply」で適応します.するとパスワードを要求されるので入力すると,必要なパッケージのインストールが始まります.結構時間がかかって2分ほどかかりました.その後「Language Support」の画面に戻りますが,この時の日本語表記は文字化けになっているのですが,問題はないのでそのまま「Close」で閉じます.もう一度「Language Support」を開いて「Regional Formats」の一番上の「Display numbers...」で「日本語」(この時には文字化けが解消されています)を選びます.本当はこの時に「Region & Language」で「Japanese」を選べればいいのですが,なぜか選択肢が出ないので,一度「Settings」を落とし,改めて「Settings」を開きます.そうすると「Region & Language」で「Japanese」を選択できるので,選択後,下に出てきた「Restart」で一度ログアウトします.その後ログインしなおすと,日本語に切り替わります.
このタッチスクリーンはKhadasのSBC専用のもので,5インチのサイズでHD画質(1080×1920)をもち,5点マルチタッチに対応しているものになります.5インチでHD画質を出せるのはほとんどないので小さい割に高画質なものとなります.
まずはタッチスクリーンを使用できるようにデバイスツリーを変更します.書き換える設定ファイルは以下の通りです.
/boot/dtb/rockchip/rk3588s-khadas-edge2.dtb.overlay.env
ここには最初から「fdt_overlays=」と記入されているので,このファイルをsudo権限で開いて以下のように修正します.
fdt_overlays=mipi-panel
ここで修正したら一度シャットダウンします(反映させるだけなら再起動でいいのですが,TS050を配線するので電源を落とします).シャットダウンが完了したら電源のUSB-Cも抜いておきます.
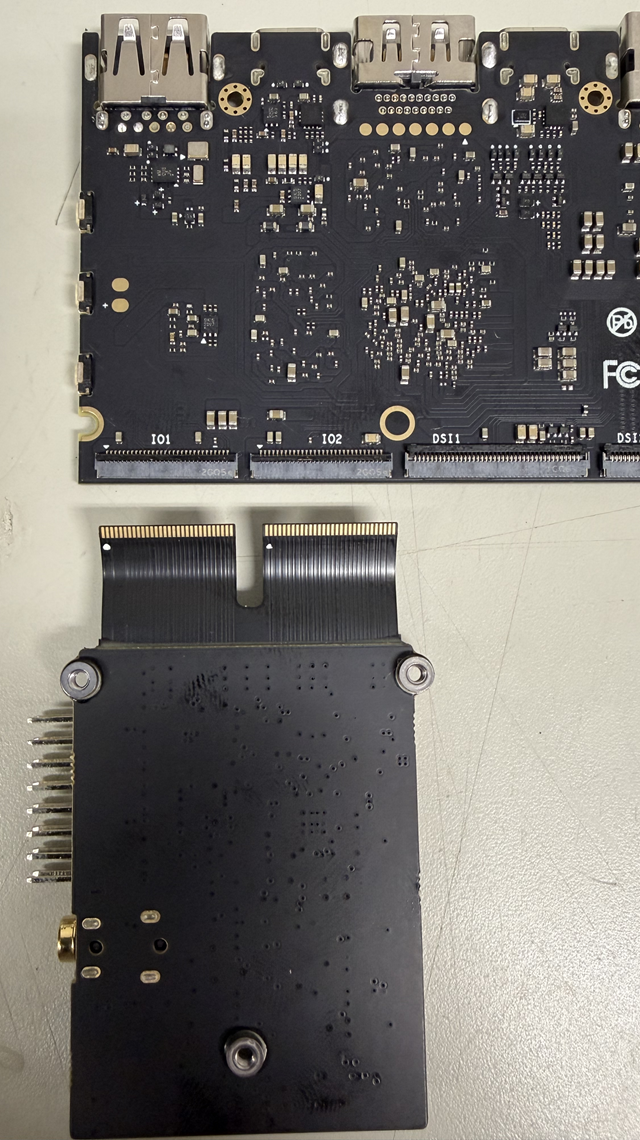
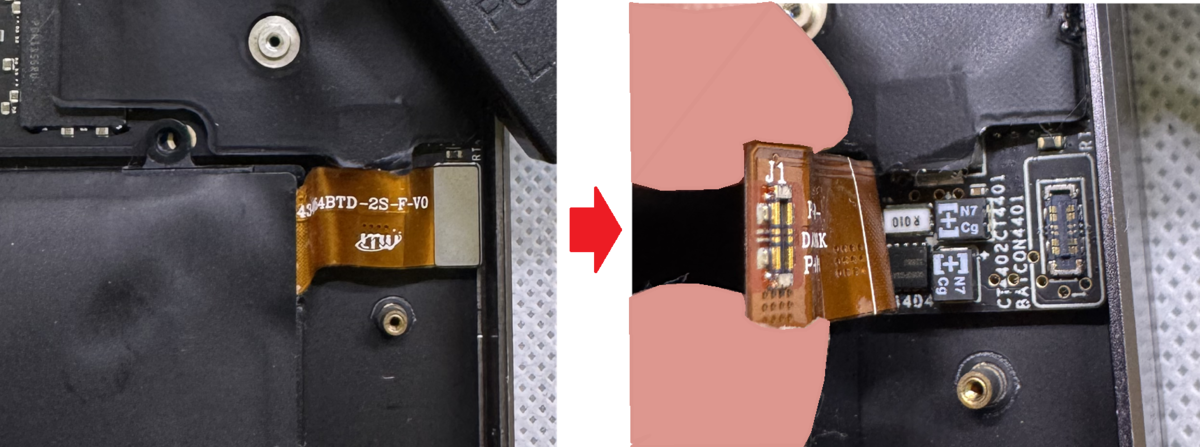
TS050にはKhadasのSBC用に2種類のケーブルがあります.TS050側は2つに分かれていますが,SBC側も2つに分かれているもの(左)と1つのもの(右)があります.
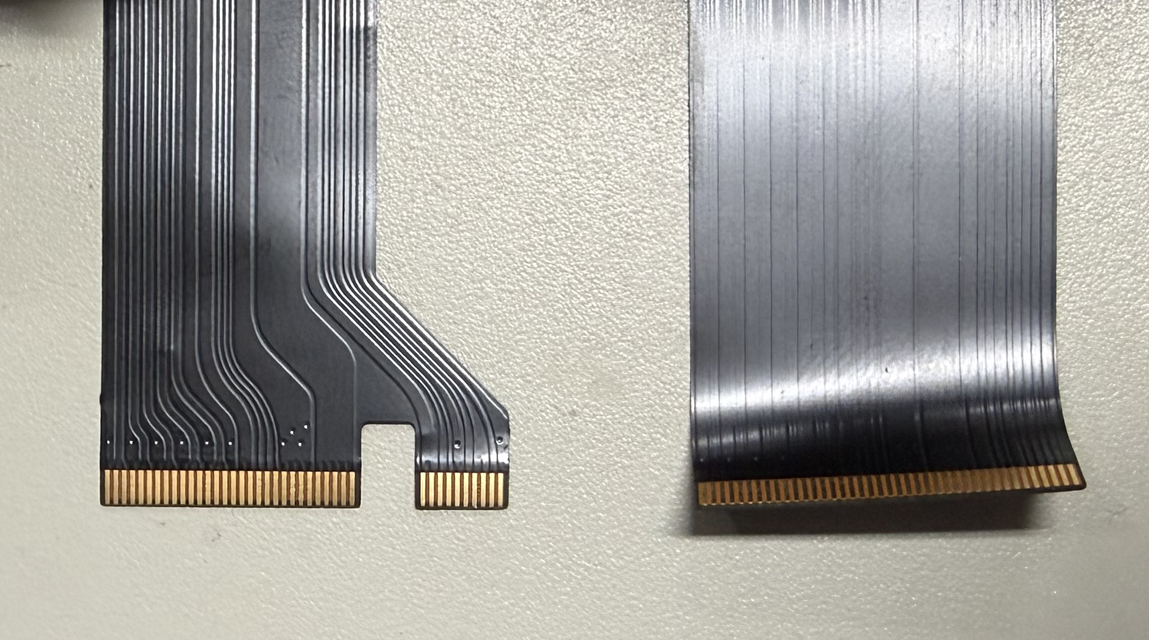
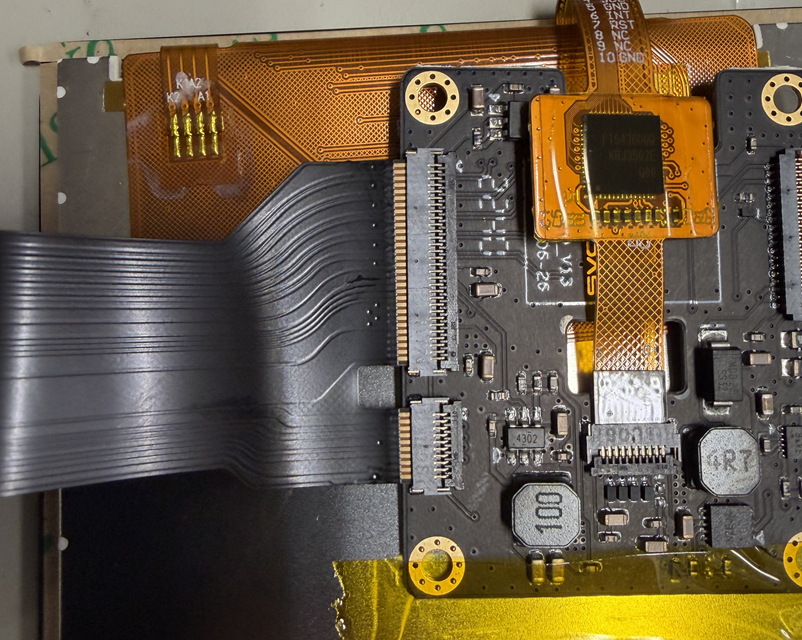
Khadas Edge2 では1つの方を使います.私が買ったものは2つに分かれたほうがあらかじめ刺さっていたので刺し直します.Khadasの商品のフラットケーブルのソケットはIO Moduleのソケットと同じく,ロックを上に上げることでロックが解除できるので,上げてしっかりと挿します.この時,下の図のように端子側が上に来るようにします.
次に反対側をKhadas Edge2に刺しますが,場所はIO Moduleを刺した隣のDSI1と書かれた方です.これもIO Moduleのソケットと同じようにロックを外しますが,ケーブルを刺す向きがIO Moduleのケーブルとは違い,端子側を下にして刺します(下図参照).
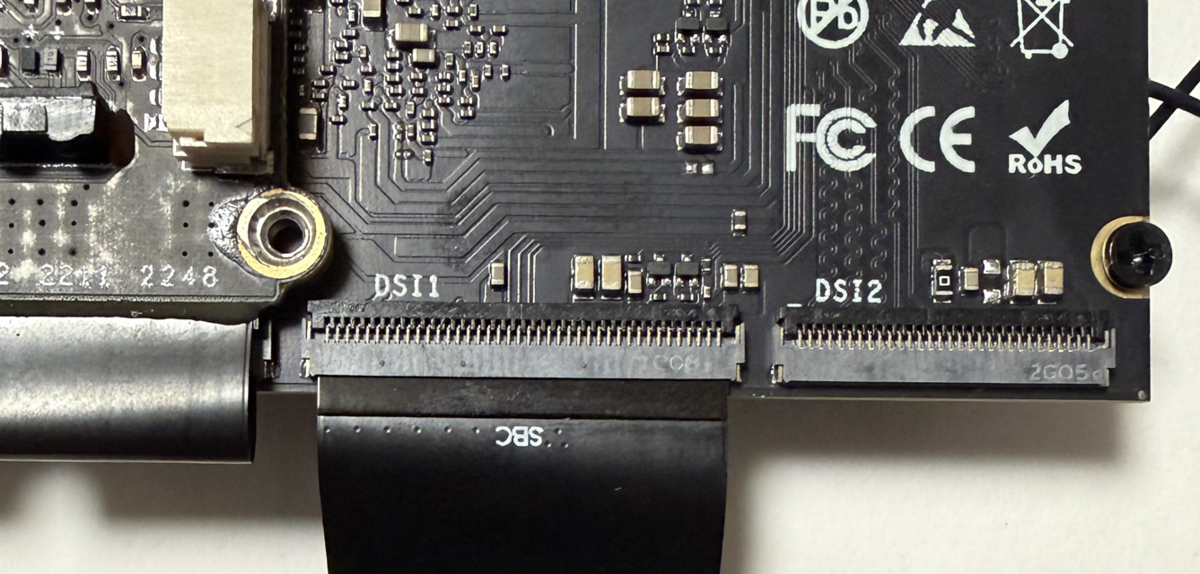
しっかりと奥まで挿した後,ロックをして接続は完了です.
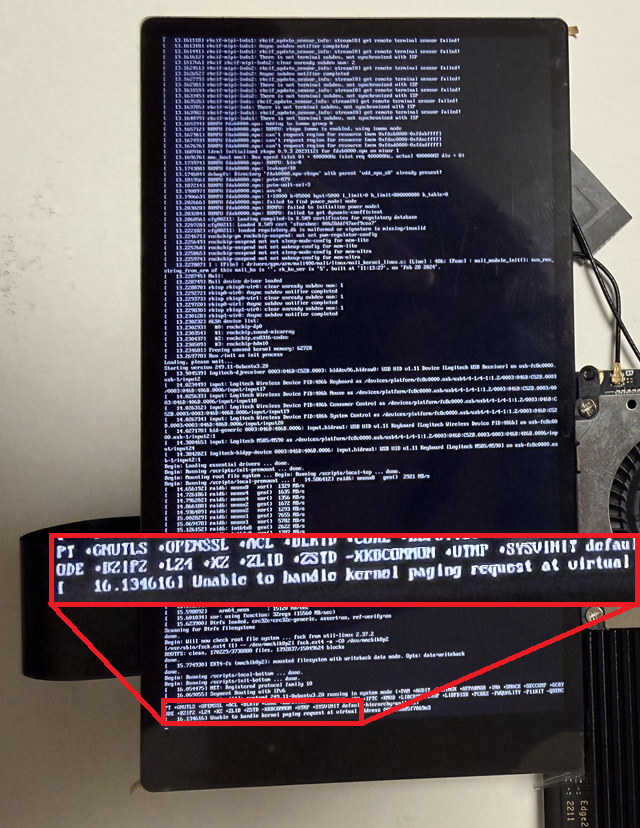
改めて電源のUSB-Cを刺して起動するのですが,画面の構成(DSIを使う/使わない,HDMIを使う/使わない)を変えるたびに起動に失敗するようです.なので,起動直後の文字列の表示が止まった時(下図参照,大体最後は「Unable to handle kernel...」となっています),Reset Keyで改めて起動しなおすことで無事に進むことができます.
ただ,見ての通り,画面が縦向きで使いにくいので「設定(日本語の場合)」の「ディスプレイ」から「ビルトインディスプレイ」の「向き」を「縦方向(左向き)」とすると,ケーブルが出ている方を下にしたときに見やすい向きになります.

いかがだったでしょうか.OSのインストールからタッチスクリーンの接続・設定まで行いました.次回は実際にIO Moduleを触っていきたいと思います.
*1:ついでに言うと,こういった複数ポートある充電器の場合は供給可能なW数や電圧が接続数や接続箇所によって変わるのであらかじめ調べておいた方がいいです.これの場合は100W(20V 5A)供給ポートが2つあるので片方をノートPC,もう片方をKhadas Edge 2とすることで十分にマージンを取って使用していました.このあたりは出力表をしっかり見ておく必要があります.
皆さん
こんにちは,HAVRMです.
以前(といっても数年前ですが...)購入したKhadas Edge2 Proをこのゴールデンウィーク中に使ってみようと思い,開封から試用までやってみたので記事にしようと思います.普段ならこの程度なら書かないのですが,IO Moduleについて誰も書いていないようなのでそれについても書いていきたいと思います.

")
SBCの中ではトップクラスに軽く(ボードのみで25g),厚みも端子を含めて5.7mm(ケース込みでも16mm)となっています.Raspberry Pi 5が46g,厚み18mmであることを考えると,とても軽量で薄いことがわかります.標準ではSDカードをさせず,内蔵されたeMMCにOSを書き込む形になります.
Basicはメモリが8GBでeMMCが32GB,Proはメモリが16GBでeMMCが64GBとなっています.また有線LANのポートもなく,無線LANでネットワークにつなげる形ですが,こういったSBCの中では珍しく技適を取得しています.そのため国内でも問題なく使用することができます.電源は2つあるUSB-CポートのどちらからでもUSB PD(12V 2A)で供給しますが.片方は電源供給のみ(CPUがある面のRTCバッテリー側)なので,USB-Cで機器を繋げる際は注意が必要です(記事を書くまで忘れていました...).電源は5V 3Aでも動作したようなので,あまり厳密ではなさそうですが,できれば12Vで入れたほうがいいと思います.他にもUSB-Aが2ポート,HDMIが1ポートありますが,それ以外はすべてフラットケーブルでの接続になります.IO関連も全てフラットケーブルで扱いづらかったのですが,最近IO Moduleが予告通り販売されたのでましになったはずです.
小型でかつ,高性能ということもあって販売当初から4~5万円程とRK3588系統を載せたものの中で圧倒的に高価でしたが,昨今のメモリ不足によるRaspberry Pi 5の高騰で,メモリ16GBと比較するとこちらの方が安いという逆転現象が起きています...
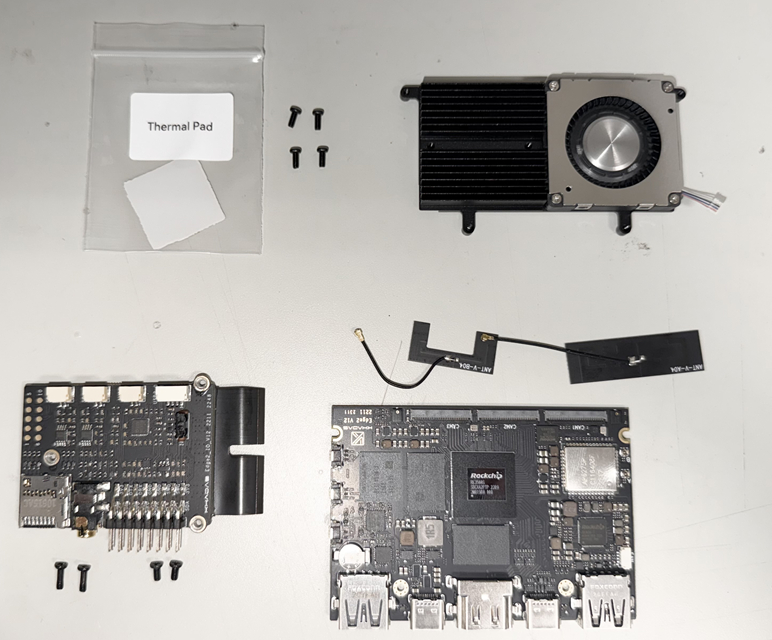
このEdge 2には現状複数のオプションパーツがありますが,今回は以下ものを用意し,使う予定です.他にも有線LAN用(ケースが必須の可能性あり)や各種カメラがありますが,今回はおいておきます.
ここから,CPUのある面を表面,反対側を裏面とします.なお組み立て時はマニュアル等無かったので説明の順番と写真の順番が異なりますが,この記事の順がおそらく正しい組み立て順です.
なお,ドライバーは普段使っている精密ドライバーの「+2.5」を使っていますが,もう少し大きくてもよかったかもしれません.
といっても写真を載せるだけです.
Edge2にはパーツ固定用の穴が4か所空いています.この穴全てをファンの固定に使用するので,他のパーツがつけれない可能性があります.IO ModuleはEdge2のファンの反対側(裏面)に折りたたむように固定できますが,明らかに使うネジ穴が被っています.特にボード側が貫通穴なのでそのままでは固定できないです.これについてどこにも詳細がなかったので,最悪IO Moduleは別途固定することにして購入しています.実際には無事に組み立てられたのでそれについて書いていこうと思います.
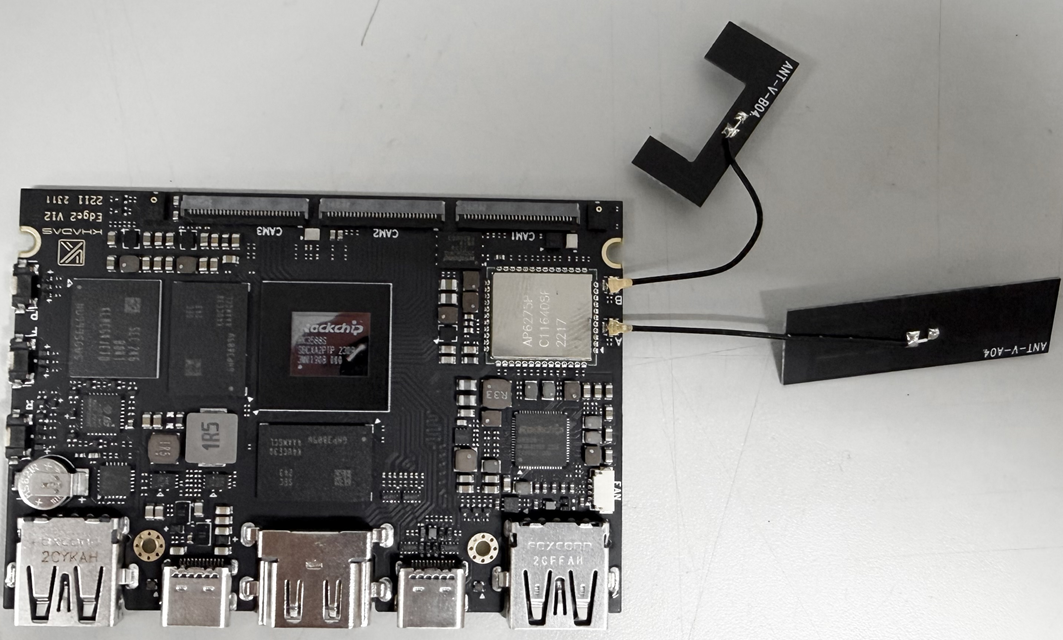
Edge2本体にアンテナが2つついています.これをボードの無線モジュール(表面の銀色のチップ)の近くにある小さいドーナツ状のコネクタ(おそらくMHF4)に取り付けていくのですが,本体と同封された説明書通りにまっすぐなものをAに,コの字形状をBに固定します.カチッと音が鳴るぐらいしっかり押し込んで固定します.
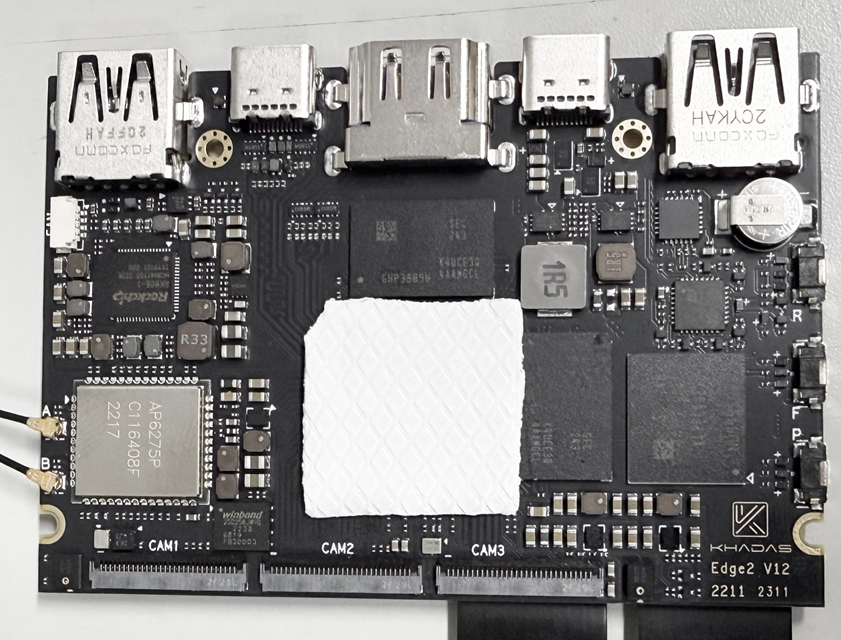
ファンにはあらかじめサーマルパッドとM2×4.5のねじが4本同封されています.まずはCPUにサーマルパッドを貼り付けます(写真ではすでにIO Moduleのケーブルが刺さっていますが,気にしないでください.混乱しながら組み立てている証です).
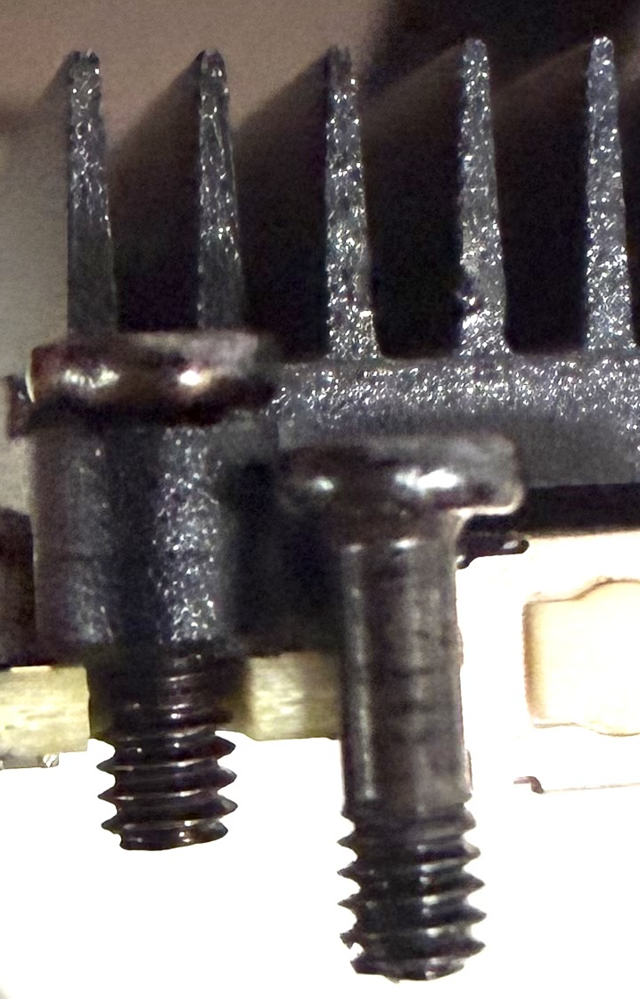
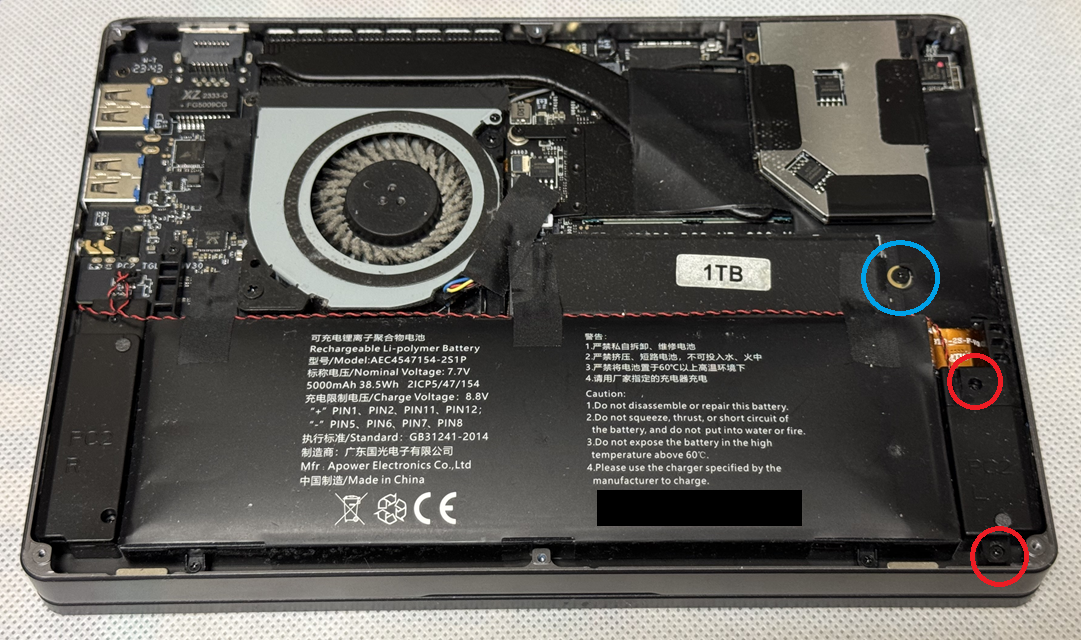
次にファンを固定しますが,IO Moduleを使わない場合は付属のねじで裏面から固定します.IO Moduleを使う場合はIO Moduleに入っている長いねじ2本を使います.というのもおそらくネジ側が特殊みたいで,ネジ部はしっかりファンのねじにあたるのですが,非ネジ部がネジ穴に対し隙間穴状態になります(普通はあり得ない).
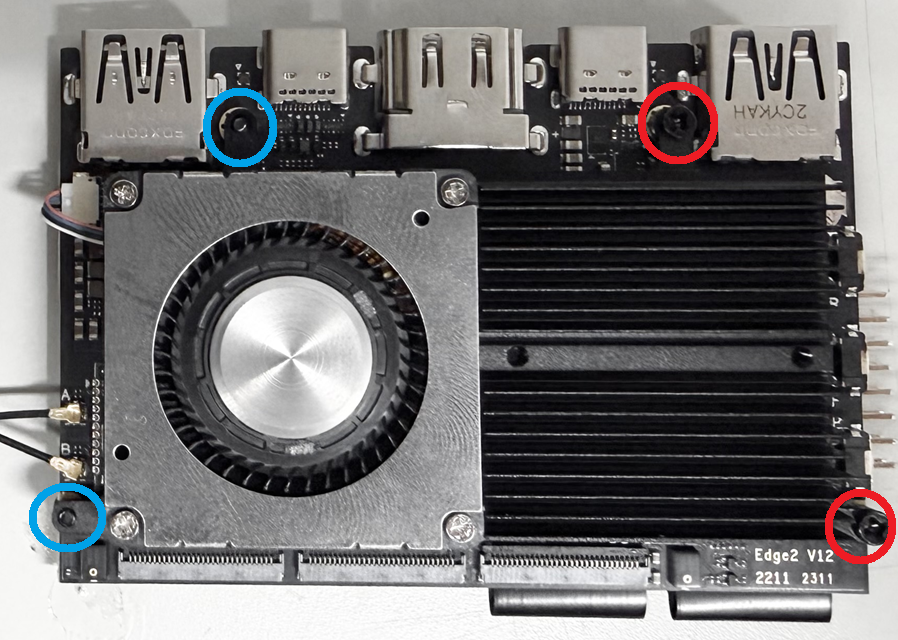
そのため,IOボードが裏面にくるヒートシンク側(図中赤丸)は表面から長いねじを,ファン側(図中青丸)は通常通り裏面から短いねじで固定します.長いねじの方は固定はできないのですが,ファンのねじ穴内でネジが自由に動くようになるまで,ネジを通し切ってください.そうしないとIO Moduleを組み立てる際にダブルナット状態となり,締めるのが大変になります.なお固定前にファンのコネクタは刺しておいたほうがいいと思います.図のように反転して刺す形ですが,ケーブルが短く,ファンを先に固定してしまうと,とても刺しにくかったです.写真はすでにIO Moduleも固定していますが,見なかったことにして下さい...
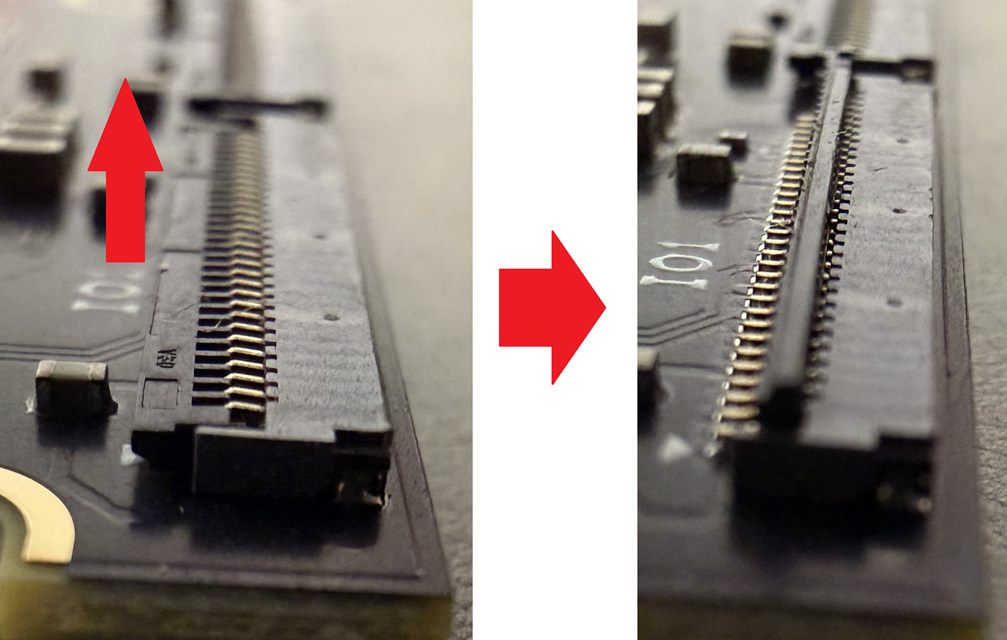
まずはフラットケーブルをEdge2に取り付けていきます.フラットケーブル用のコネクタはロック用のタブを上に回すようにして開けるタイプです.使うコネクタは裏面にある「IO1」と「IO2」のコネクタなので両方開けておきます.
ロックを外したら,IO Moduleのケーブルの金属が見える側を裏面と同じ向きにして挿入します.この時,導線の露出部分はほぼ見えなくなるぐらいまで挿せます.
ケーブル挿入後はコネクタのロックをもとに戻し,ケーブルに大きな負荷をかけないようにまげて,Edge2の裏面に沿わせます.
その後,ファンに刺してある長いねじを締めて,IO Moduleを固定します.
これでIO Moduleの組み立ては完了です.
いかがでしたでしょうか.あまり国内では使用例を見ないKhadas Edge2にオプションパーツを付けていく内容となります.特にIO Moduleについては言及しているサイトが少なく,組み立てについては記載しているサイトを見つけられなかったので記事を書いてみました.次はOSのインストールをやっていきます.
*1:シングルボードコンピュータの略,Raspberry Pi等
皆さん,こんにちは.HAVRMです.
以前から使用していたELECOM製トラックボール式マウスM-XT3DRBKのホイールの反応が悪くなったため,センサの交換を行ったので,それについて記事を書きます.
症状としてはホイールを回してもページスクロールできなかったり,逆にいったりといったものです.他のマウスでも経年劣化でよく起きる不良なので,設計の問題とか,使い方の問題といった特別な問題があるわけではないです.大体同時期にクリックの方も問題が発生することが多く,買い替えのタイミングでもあります.かれこれ5年ぐらい(修理当時)使っているのでしょうがない範囲です.
マウスは一般的にクリック部はマイクロスイッチやタクトスイッチ,ホイール部はポテンショメータといったよくあるセンサを使っています.ポインタの移動には速度タイプのセンサを使っていて,ここの性能でELECOMの「ULTIMATE Blue LED」(今は「ULTIMATE IR LED」が新しく出ているみたいですね)がトップクラスの性能を持っていたため,よく選んでいたといった経緯があります.また,ELECOMはホイールのクリックだけでなく,左右のクリックがついている機種もあります.
このマウスの場合,通常の左右とホイールのクリックに追加して,進むボタン,戻るボタン,ホイールの左右クリック,好きな機能を割り当てられるファンクションキーキーが右クリックの隣にあります.またホイールの下にポインタの速度調整ができるスライドスイッチがあります.電源にも「L」と「H」がありますが,あまり違いを感じません.
特に専用ソフトでクリックを割り振っていない場合,進む,戻るボタンはそのままブラウザ等の「進む」と「戻る」機能となり,ホイールの左右クリックは左右のスクロールになっています.ファンクションキーは以前はポインタの一時的な速度低下に使えた気がしますが,今は機能していません(専用ソフトを入れる必要がありそうです).ポインタ速度は普段は低速にしています.電源は「H」に入れています.
まずは分解してホイールのセンサを確認します.以前分解したときの記事通りに分解をして,センサ配置を見ていきます.
havrm.hatenablog.com
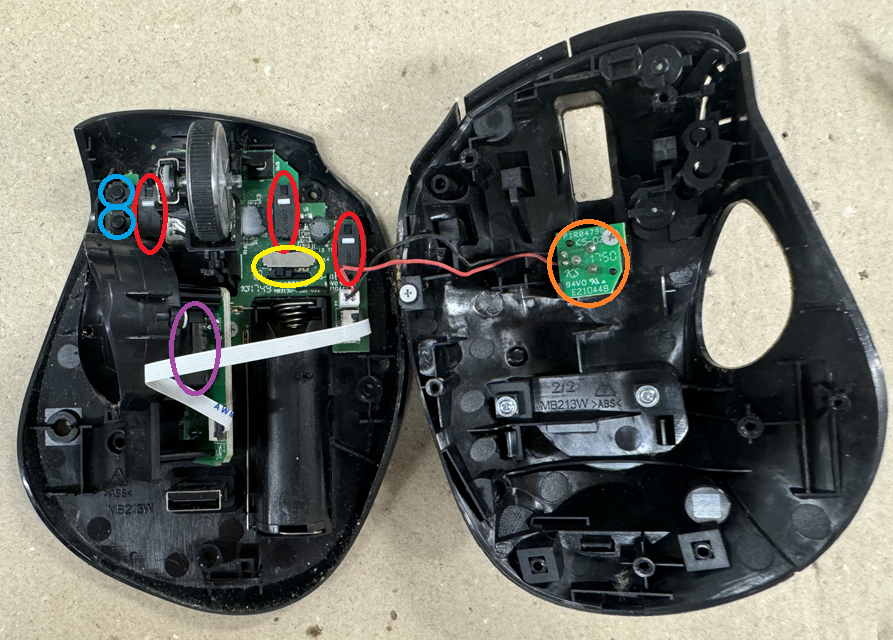
ホイール周り以外のセンサを見ていきます.赤丸がオムロン製のマイクロスイッチで左右とファンクションキーに使われています.これについては詳細説明にも明記してあります.青丸が進むボタンと戻るボタン用のタクトスイッチになります.黄色が電源用のスライドスイッチになります.紫はトラックボールを読み取るセンサですが,基板ごと斜めにつけてあり,フラットケーブルで主基板と接続されています.オレンジは速度変更スイッチでこれは2本の線で主基板とつながっています.センサ自体は上側のフレームにあるので,写真には見えていません.
次はホイール周辺を拡大してみます.
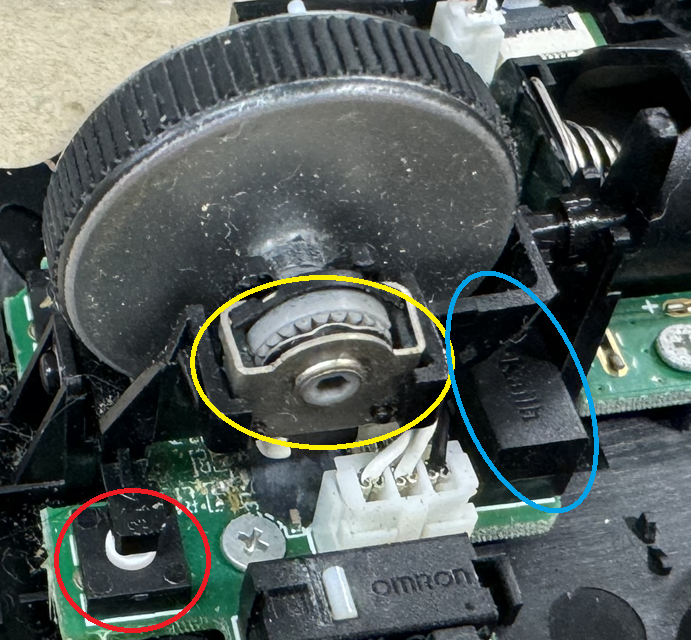
黄色がホイールの回転を測るポテンショメータ,青丸がホイールのクリックのマイクロスイッチ(これはオムロン製ではなく,Kailh製のようです),赤丸(隠れている反対側にもあります)がホイールの左右クリックのタクトスイッチになっています.
このホイール周辺の動き方は次のような感じです.
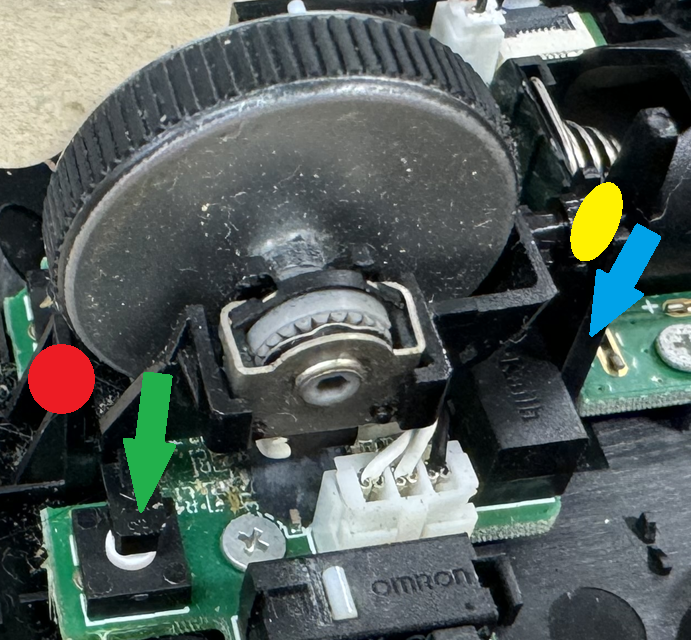
赤丸の位置がすべての動作の支点となっており,薄い丸穴に丸軸で刺さっています.一方の黄色の丸はU字の溝に丸軸が置いてある構造で上下に少しずれます.ホイールクリック時はこの溝に沿って押し下げられることで下にあるマイクロスイッチを押します(青矢印).ホイールの左右クリック時は赤と黄色を支点としてホイールユニットごと回転することでタクトスイッチを押します(緑矢印).この左右クリック時は結構ホイールが傾斜するため,ホイールの回転を測るポテンショメータはケーブルで主基板に接続されています.
ということでホイールユニットを取り出します.上の画像の黄色の丸から外し,赤丸のところを抜く形で取り出せます.抜いた状態でケーブルに負荷をかけないようにコネクタ周りにスペースを作って,コネクタを外します.

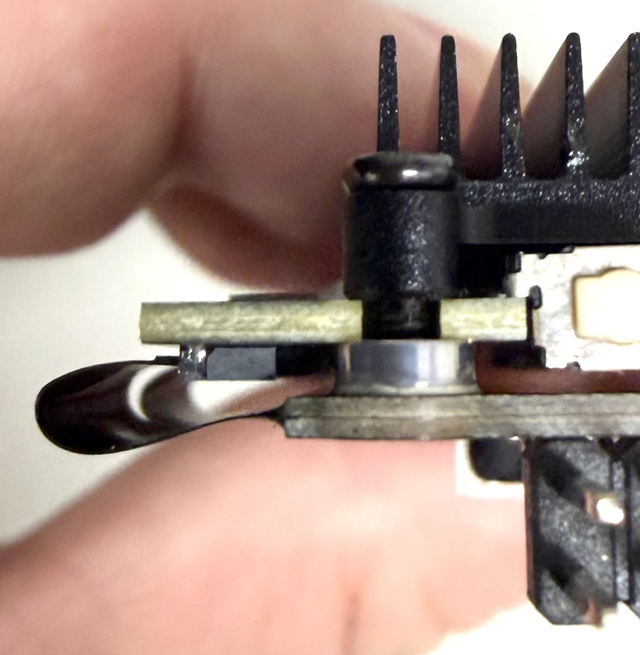
次にホイールとポテンショメータをホイールユニットのフレームから取り外します.ホイール,ポテンショメータともに上から押し込む形で入れられているので,ホイールを下から押し出すようにツメを外して,取り外します.

ホイールとポテンショメータは六角形の軸と穴ではまっているだけなので引っこ抜くことで外すことができます.
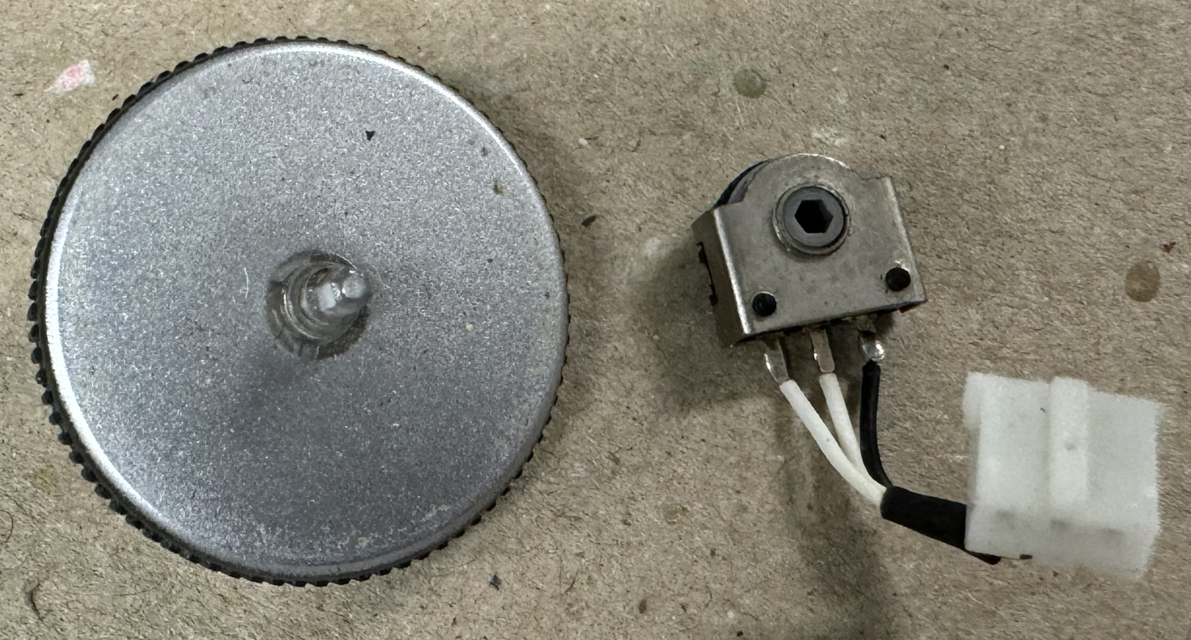
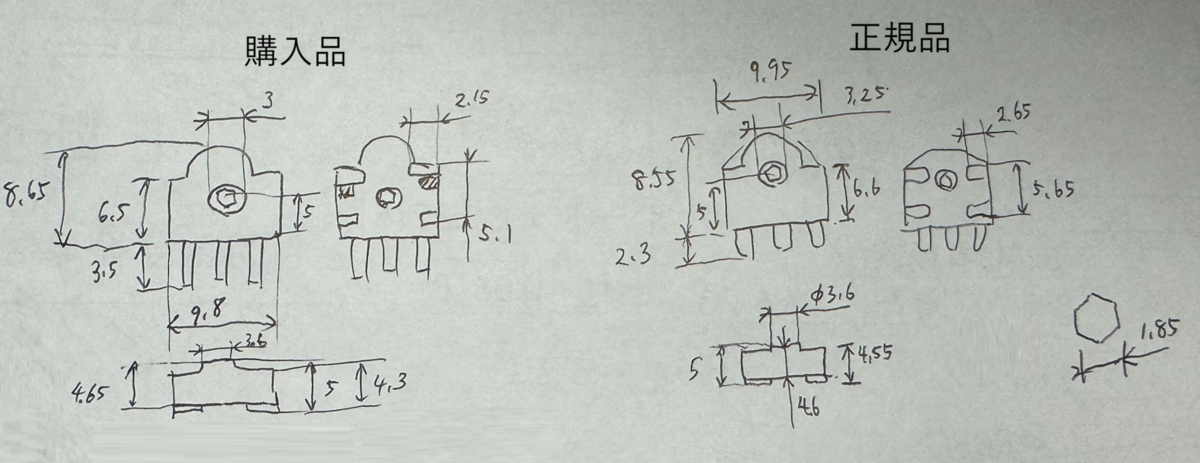
ということでポテンショメータを外せましたが,型番についてはわかりませんでした(特に刻印等なかったです...).そこで似た形状のマウス用のポテンショメータを探しました.大まかな寸法を測り,それに近いサイズのものを探した結果,複数種類まとめて販売している中に似たものがありました.
この5種類のなかで一番背の低いものです.まずははんだでケーブルを繋げ直します.浮いている端子につけるので固定台等無いと少し面倒ですが,特に問題なくできます.

次にはめ込む前に詰め物をしますが,調整した結果,マスキングテープ8枚分をホイール側につけるとちょうどよかったです.

あとは分解した時と逆順に組み立てていくだけです.ただ,マウスの外装を組み合わせる際にファンクションキーのスイッチと上側フレームの押す部分がずれて押せなくなったり,速度調整用のスライドスイッチのケーブルを巻き込んだりする恐れが高いので注意してはめます.
ということでマウスM-XT3DRBKのホイール修理でした.ELECOMでホイールの左右クリックがある場合,ポテンショメータの交換は比較的簡単に行うことができます.それ以外のマウスだと基板に直付けしていることが多く,取り外すのに苦労することが多いです.
修理してから1年以上使っていますが,今もホイールは問題なく使えています.最近は別途仕事用に3年前に購入した同型の有線タイプの方がホイールの動きが怪しくなってきました.そのうち同じように交換すると思います.
手書きのメモですが,参考程度に.
皆さん,こんにちは.HAVRMです.
今回はGPD Pocket 3のバッテリーを交換したのでそのあたりの話を書こうと思います.
GPD Pocket 3とは最近話題?のUMPC(Ultra-Mobile PC)の一種で8inchの1920×1200ディスプレイにIntelのCPUを搭載したハイスペックUMPCです.
www.gpd.hk
中でも変わっているのはこの分野の中ではゲーム用が大多数を占めますが,本PCはビジネス用に作られているためジョイスティック等のコントローラは搭載されていません.その代わり,背面にあるモジュールを変更することができ,「USB 3.2 Aポート」「RS232ポート」「KVMポート(HDMI IN&USB OUT)」から選ぶことができます.
既に後継機の「GPD Pocket 4」が販売されていることもあり,現在は「Intel Core i3-1125G4」しか公式サイトにないですが,以前はいろいろなCPUで販売されていました.私はその中でも最高スペックだった,すでに販売が終了している「Intel Core i7-1195G7」で容量が1TBの型を所持しています.以前サイトに書いたCF-XZ6の代わりに持ち運びに特化したものが欲しく中古で購入しています.現在の主力はGPD DUOですが,それを買うまでは仕事でも普通に使っていました.
なお,このPCは小型化しすぎたせいか,CPUの発熱を十分に放熱できず,とても熱くなってしまいます.また手持ちで使うことを想定し,タッチパッドとクリックがキーボードの上にあるという変わった配置のため,置いた状態だと結構操作が面倒です.なお小型化が大変だったのか,キー配列も一部変で数字キーとファンクションキーが同じキー(Fnキーとの同時押しでファンクションキーとなる)ですが,その番号がずれている(数字の1はFn2みたいになってます)のも,一部混乱するもとになっています.
先ほど記述した放熱性能の不足からか,バッテリーが大きく膨らみ,キーボードが出っ張るようになっていました.ほんの数日での変化でしたが,気づいたときにはディスプレイをうまく閉じれないようになっていました.このPCはフレームがプラスチックではなく,アルミフレーム(A6061)なので,それを考えると相当な内圧が発生していました...

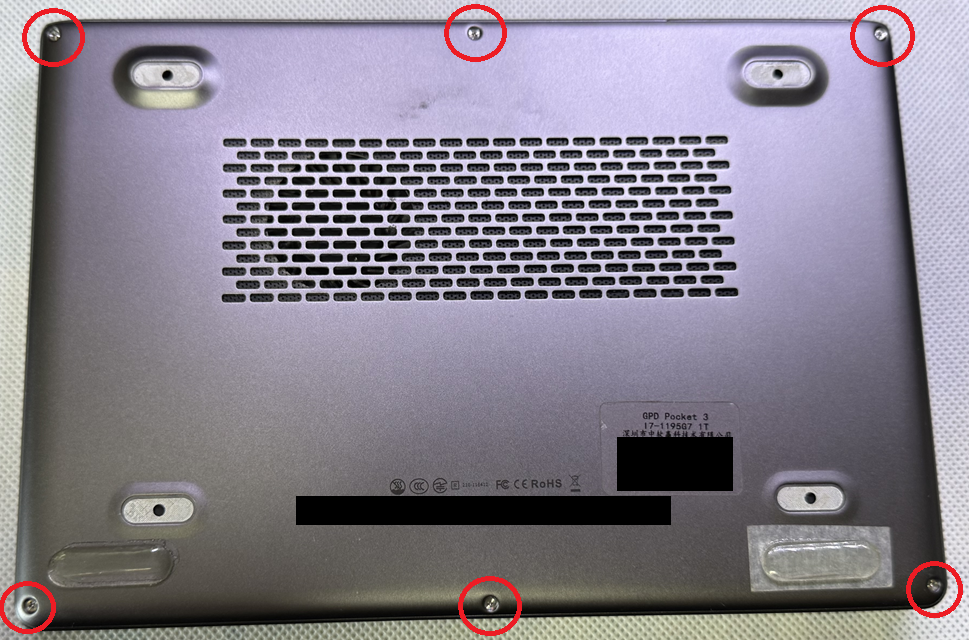
まずは急ぎバッテリーを取り外します.GPD Pocket 3は背面に6か所プラスネジで固定されていますが,全て露出しています.なおゴム脚は何度も擦るように使ったため,全て取れており,現在はDAISOで購入したゴムクッションを付けています(なお,劣化で接着剤だけ残ることが多かったので,マスキングテープの上から貼るようにしています.在庫がないみたいですね.すでに販売終了しているのかも...).
クッションゴム、横長タイプjp.daisonet.com
もともとのゴム脚は4か所でしたが,設計の問題ががたつくということもあり,通常は3か所で使っていますが,この時はすでに1つはずれて2か所のみになっています...
普段使用している精密ドライバーの「+2.0」でちょうどいい感じでした(内部のねじもすべてこれでできました).
ネジをすべて外すと運がいいと裏ブタは逆に反っているため,その力で勝手に外れますが,外れなかった場合は裏から見て右側の裏ブタと本体の隙間に爪や薄いカードなど刺して内部のツメを外すと取ることができます.
内部の放熱のためだとは思いますが,ここまで露骨に反っているのは初めて見ました...
それで裏ブタを外した様子はこのようになっています.
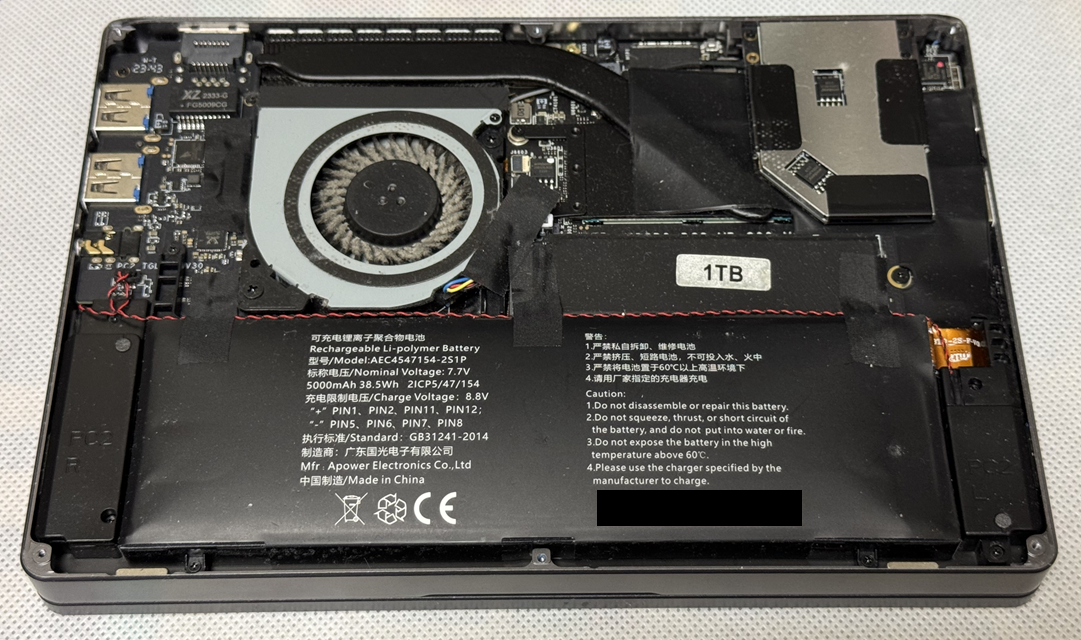
バッテリーがとても膨らんでいることがわかります...
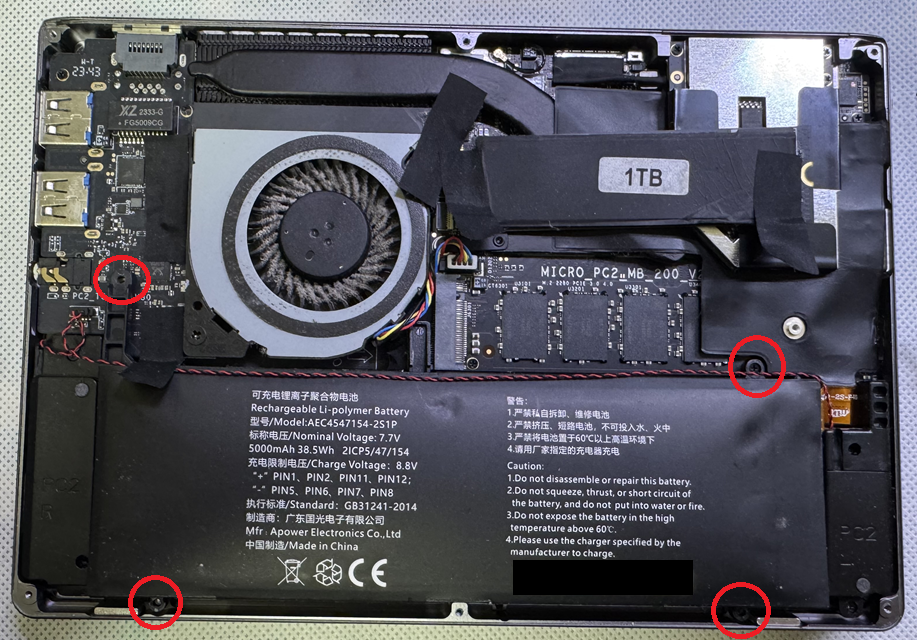
この状態だと,SSDの裏にあるバッテリー固定ネジと左スピーカーの下にあるコネクタにアクセスできないため,これらを取り外します.SSDはM.2タイプで通常と同じく,ネジで抑えることで固定されているため,下の写真の青丸のねじを外し,斜めに浮くので,引っこ抜きます.この際,バッテリーとの間にテープが張られているので,これも除去します.次に左スピーカーのねじが2か所(赤丸)あるので,それを外します.スピーカーはネジ穴部分が突き出ており,それで位置を正確に固定しているので外す際は真上にひくように外します.
これでようやくバッテリーのねじが見えるので取り外します.位置は下の写真の赤丸の4箇所です.真ん中の突き出ているところにはネジがないので安心?して下さい.
その後,バッテリのコネクタを取るのですが,押し込むことで嵌めているタイプなので,コネクタの端の金属で補強されているところを持って引きます.結構力が必要でした.
ここまで外したら,バッテリーに残っているテープを外せば,そのままバッテリーを除去できます.実際に外したものが下の画像です.相当膨らんでますね...

外したバッテリーは導通対策のためコネクタをテープで巻いた後,衝撃防止の緩衝材でくるんだ後,延焼防止のため空き缶に詰めてノジマに持っていきました.ノジマは膨らんだリポは回収できない可能性がある(サイトには「処分を承れない場合がございます」と記載)と書いてありますが,これまで断られたことはないです.他の家電量販店では「処分できない」と明記していることが多い中,珍しい店舗になります.なお,最近市区町村でリポの回収を始めているところが増えてきたので,今後は廃棄に困るということは減っていくと思われます.ただ危険物には変わりないので指定された方法で適切に廃棄するようにしましょう.
バッテリーの型番は「AEC4547154-2S1P」で,該当する商品を探したところ,Yahoo!ショッピングで見つけました.
store.shopping.yahoo.co.jp
工具もセットで購入できましたが,持っている工具で十分に対応できているため,今回は工具は無しで,バッテリーのみ購入しました.
なお,バッテリーを廃棄してから届くまで日数があったため,その間バッテリー無しでも電源のみで起動できるか確認してみました.結果としては純正の充電器を使ってもダメでした.このPCの充電方法がUSB PDしかないというのが問題のようです.最初は電源ランプがつくのですが,そのあとUSB PDの電圧調整が入るためか,電気が瞬断するため,そこでPCが落ちて起動まで進めませんでした.この瞬断は他の充電器でも発生しうるのでバッテリー無しでの起動は難しいというより不可能ってことになると思います.
バッテリーが届いてからは膨らんでいないことを確認し,外した時の逆順で取り付けていきます.実際に取り付けが終わった様子が下の画像です.バッテリーがちゃんと平らになっています.またこの時にファンの埃をエアダスターで吹き飛ばしています.

これで裏ブタを閉じるのですが,意外とツメがうまくはまらず苦労しました.うまくいった方法は,まず少し斜めにずらした状態(下の画像)で一部のツメをひっかけた後,押さえつけながら回すように嵌めていったところ,うまくツメがはまりました.以前はそのまま押し込めば入っていたのでちょっとした運とかもあるかもです.うまくはまらなかった場合はこの方法を試してみてください.

いかがだったでしょうか.珍しいUMPCのバッテリー交換をやった様子になります.裏ブタがうまくはまらなかった以外は特に問題はなく,バッテリー交換ができました.皆さんもバッテリーが膨らんでもパソコンごと処分せず,交換してみるのもありだと思います.ただし,すべて自己責任でお願いします.
なお,交換してから半年以上使用していますが,特に問題なく使えていました.ただ,最近ファンの様子がおかしいので,様子を改めて確認してからファンの交換をしようと思います.
皆さんこんにちは,HAVRMです.
ここ最近,欲しい基板が販売されていないことが多く,自分で設計して発注を何度かしました.仕事の関係上「P板.com」を使っていましたが,個人で利用するにはとても高い(100×100mm 10枚で4万円以上)ため,「FusionPCB」を使ってみました.いろいろ作ってみているので記事にします.細かい技術系はまた別途作ると思います.
名前だけを聞くとAutodesk Fusionとの関係を疑いたくなりますが,seeed studioが手掛ける基板製造・実装サービスになります.マイコンをよく使う人ならXIAOシリーズの会社といえばよくわかると思います.
www.fusionpcb.jp
昔の中国のこういった製造サービスでは10枚セットで作ったうえで数枚は製造ミスが混ざるといわれていましたが,ボードを開発している会社であり,ある程度安心感を持って依頼することができます.値段は100×100mm 10枚の最低価格が$4.9(約765円)となります.何なら送料の方が高いぐらいですが,送料と合わせても最速配達で$18.73(約2922円),最安配達で$8.08(約1261円)となります.製造は3~4日,送付に4日以上(最安配達だと最大実働15日=3週間)となり,それなりに時間はかかりますが,3千円出せば1週間ちょっとで基板が届くのでとてもお得だと思います.
一番はArduinoシールド用のユニバーサル基板が欲しくなったためです.もともとハーフピッチの基板(秋月の104707)で頑張って作っていました.

ただこの作り方だと,ArduinoのSCL,SDAまで届かないため,これらのピンを使いたい場合は専用の基板を買わないといけませんでした.しかし,秋月とかで販売されていた(販売終了になっていますね...)100円台の基板(秋月:106877)だと,SCL・SDA両方使えないままで,使えるものだと300円以上(秋月:107555)するので割高に思っていました.そこでユニバーサル部分も含めて基板を設計し発注すればほしいものが手に入るのではと思い,調べたところ,マイコンボードでよく見るseeed studioのサービスを見つけ,使ってみた感じです.
Arduinoシールドに必要なサイズは大体53×69mmです.100×100mm以内なのでシールドのみでも一番安い送料だと1枚当たり120円となり,空いているスペースで別の基板を作ればさらに単価は安くなるので,買うより圧倒的に安くなります(その数を使うかは別として).
Eagle用のデザインルールはネットからダウンロードできます.
support.seeed.cc
この中の「DRU files (Eagle 向け)」をダウンロードして,「ドキュメント > EAGLE > design rules」に保存します.このうち,「*_2layer_*」となっているのが2層用になります.安く作るにはこの設定を維持したまま,いくつか気を付けて設計する必要があります.
ここでP板.comで発注したことがある人は気づくと思いますが,形状やVカット(基板を折るのに使う切れ込み)については条件がありません.製造可能範囲であればどんな形状であっても値段は変わらないようです.
デザインルールに引っかからない箇所としては以下の2つぐらいです.それ以外はデザインルールの表示に従ってください.
気を付けないといけないのはEagleでのベタパターンの間隔は最短距離ではなく,X軸,Y軸それぞれの距離なので,斜めの部分とかはデザインルール上で決めている値より小さい間隔になります.そのため,ベタパターンでの間隔を6mil(0.1524mm)以上にするためには「Isolate」の値を「0.254」に設定すれば,だいたい最短距離でも0.18mmぐらいになるので問題ないです.
外形線,Vカットともに「Dimension」層に書きます.線幅は0mmで問題ないようです.またVカットにはわかるようにVカットの文字を同じく「Dimension」層に書くようにとなっています.
support.seeed.cc
ガーバーデータ出力用のCAMはEagleにはデフォルトで内蔵してあります.「CAM Processor」のCAMを選択するところで「Local CAM Jobs > examples > Third Party > Seeed Fusion > SeeedFusion_2_layer.cam」を選び,「Export as ZIP」にチェックを入れてZIPファイルを生成します.生成されたZIPファイルをそのままFusionPCBの「ガーバーファイルを追加」からアップロードすればいいです.ある程度値が自動的に反映されるのでそれを確認して修正したりすればそのまま発注できます.
ということで実際に作ったものを載せていきます.ユニバーサル基板のスルーホールはDIP用の1mmの穴で作成し,それを面上に広げたものをライブラリ化して保存しています.なお全て回路の値段は$4.9です.送料はその時々の都合で変わっています.
まずは試作です.様子見で作ってみました.

この時,作ることを意識しすぎてシルク文字を入れるのを忘れていました...
この時は一番安い送料にして$8.08となりました.注文から15日で届きました.
次に外形が長方形じゃない場合で,ピン角(凹み部分で直角になっている箇所,基板加工時にエンドミル等で削ると円形になる部分)ありの時にどうなるかを確認するために作ってみました.Spresense用のAdd-OnボードはSwitchScienceが販売していますが,¥275と高価でまたソケットの幅分しかなく狭いです.ただ,基板サイズギリギリまで広いユニバーサル基板を加工するとGPSアンテナと電波的に干渉し,またカメラケーブルとも干渉してしまうのでそこの考慮も必要です.
SPRESENSEアドオン用ユニバーサル基板www.switch-science.com
Arduinoシールドの縦の長さは53mmでSpresense用は50mmと3mmの段差ができます.この段差のRがどの程度か確認するためにも作りました.
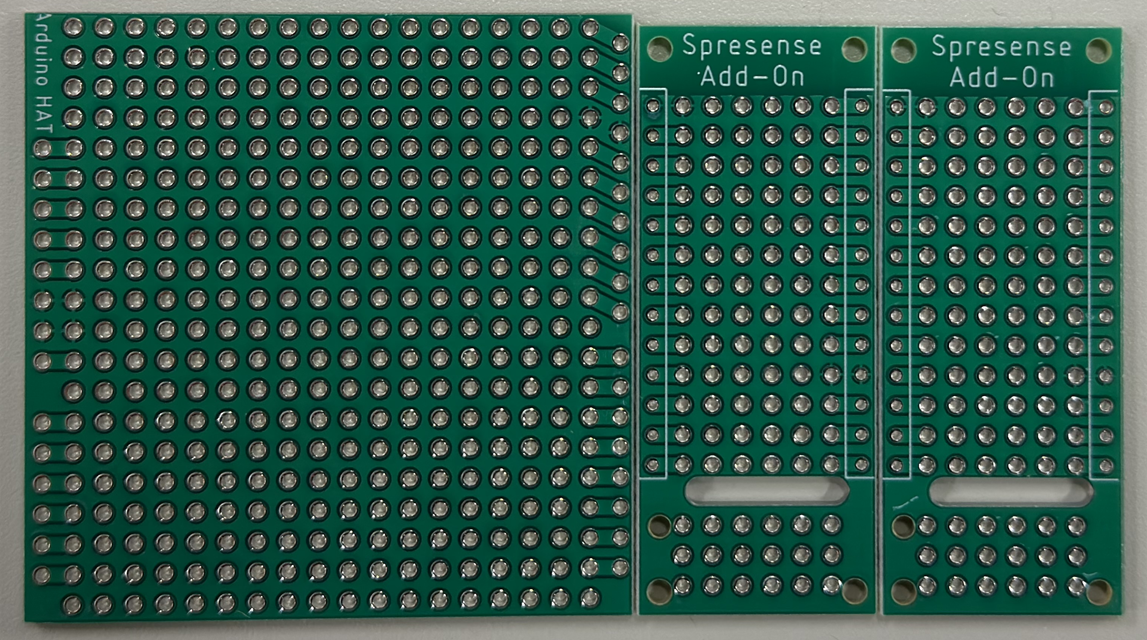
この写真は一度切り離したものを合わせて撮影していますが,段部のRは気にならない(0.5mm程度)しかなかったので,結構きれいに作れるようです.今回は名前をちゃんと入れましたが,ピンの位置を表す印等をArduinoの方で入れ忘れています...
この時は一番安い送料にして$8.22となりました.送料自体はちょこちょこ変動するようです.この時は夏休み付近ということもあり,19日で届いています.
これもRaspberryPi用HATは高く,またカメラケーブルの位置がRaspberry Pi 4とRaspberry Pi 5で変わっていて,対応しているものがなかったので作りました.また,RaspberryPi用のHATはスタッキングした時高くなりやすいので,Raspberry Pi Zero用は貫通型のソケット(FSD-42050-10)も使えるようにしています.Raspberry Pi 4/5用もそのようにすると100mm×100mmを超えてしまうため,Zeroのみにしています.また,黒色がどんな感じかも見てみたかったのもあります.

この時は$10オフのクーポンがあったため,少し早めのものを選んで$11.19となっています(クーポン適用で$1.19).この時はお盆を挟んだこともあって15日で届きました.
こちらは複雑外形形状にしています.慌てていたのもあって,「V-cut」の文字を「Dimension」に入れ忘れたり,CAMを間違えてサイトからダウンロードしたほうを使ったりしてしまいました...こちらは依頼されて作ったものなので回路部分はマスキングします.
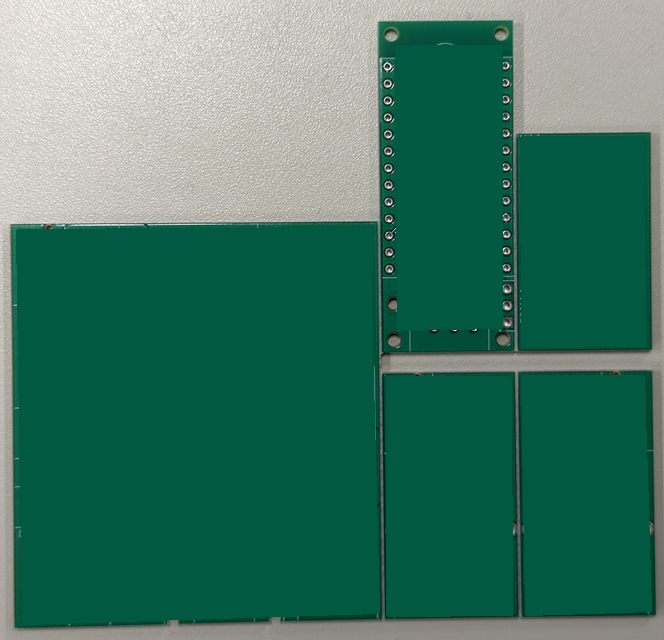
基板の組み合わせが複雑になっているのでスリットとVカットでいい感じに分けています.なおVカットがスリットで途切れているところはきちんと位置を合わせています.なお,大きい面のところはネジ穴が基板外形と被ってしまい,穴の一部が欠けて「Ω」みたいなっていますが,製造は特に問題なくできています.この時は年末年始を挟んだ上に急ぎだったため,最速で頼んだため,$18.73かかっています.12/24に頼んで,1/7についているので14日かかっていますが,しょうがないですね...
ということで簡単な基板であれば買うより作ったほうが安い例になります.設計方法を少し学習するぐらいでもできる範囲なのでやってみてはどうでしょうか.
この記事をいきなり書いたのはいよいよ2026年5月6日のEagleのサービス終了(詳しくは販売・サポート終了)近づいてきたためです.これからはFusionの方に統合されるということですが,EagleがAutodeskに買収される前から使って来たものとしては大分残念です.Autodeskに買収されたことでEagleを使うために無料版であってもAutodeskのログインが必須となり,ログインできないと使えなかったりしました.私はもともとCADはSolidworksを使っていてFusionの操作はできない(そのため,個人的な内容はOnShapeを使っています)ので,そこが統合されてもあまりうれしくないです.すでにFusionの方で回路設計ができるようになっているので触ってみましたが,デスクトップ版は操作が重くもっさりしていて,Eagleと同じ操作方法で比較しやすいというのもあって,結構ストレスを感じます.使用しているPCはGPD DUOの最高スペック品(CPU:Ryzen AI 9 370,GPU:Radeon 890M,メモリ:64GB)なのでこのPCで少しもっさり感じるのなら,普通のノートで十分に操作できるのでしょうか...パーツ挿入時もライブラリからではなく,最初から全パーツが並べられているので探すのが面倒です.またFusionはグループワークを考慮した構造になっているのも回路設計側からすれば正直面倒です(部材設計からだと嬉しい機能だとは思います).
回路シミュレーション機能も追加されているようですが,大規模な回路の時って,要素ごとにシミュレーションすることが多いのではないでしょうか.その時に一緒のソフトでできるのがどれほど有利なのかは少し疑問です.回路デザインまで考慮してシミュレーションできるのならすごいですが,そういうのはできなさそうですね.ついでに私はいろいろあって昔からあるQucsを使っています.
個人的にはこれまでと同様にEagleは別であって,必要に応じてFusionにCADファイルを送信で十分だと思います.
みなさん,こんにちは.HAVRMです.
先日公開した下の記事でWindows11で発生するエラーとその対応について書きましたが,GPD DUO特有の問題をそこに書くわけにはいかないので,改めて記事にしたいと思います.他のPCでも発生するようなエラー等は引き続き下のブログに記載します.
havrm.hatenablog.com
なお記事名にもある通り,「GPD DUO AMD Ryzen AI 9 HX 370 64GB版」での対応方法です.8840U版でも同じような問題が起きる場合は,8840U用になっているものを使用してください.
キーボードに近いほうのディスプレイの未使用しているとき(Fn + F3で第2ディスプレイをオフにしているとき),下の写真のようになったり,横のシマシマが発生したりすることがあります.
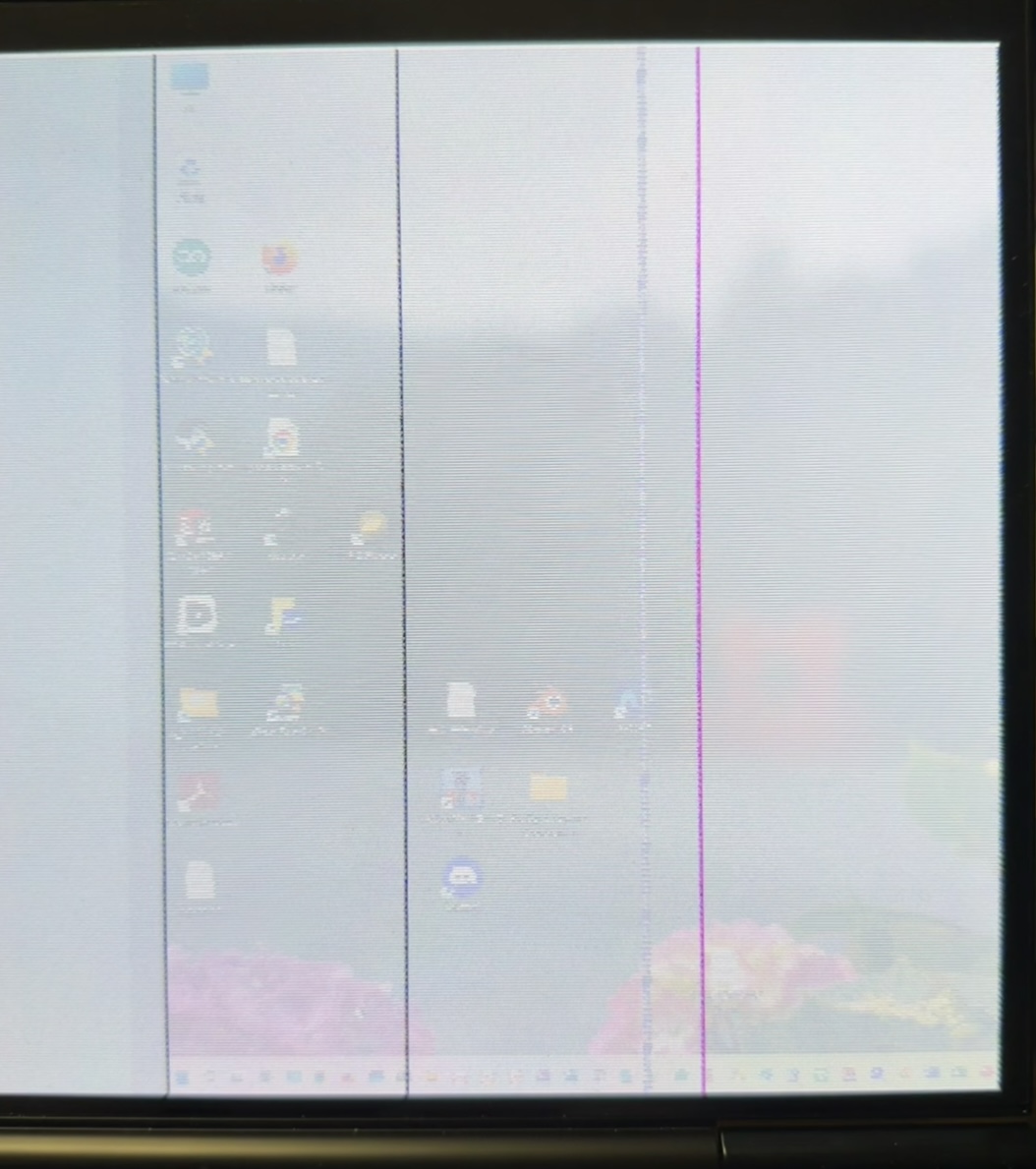
この時はGPDの公式サイトの「Drivers & BIOS」で2024年12月6日に公開された「(New) GPD DUO (370) iGPU Drivers, Fixed the screen tearing issue 12/06/2024」のドライバーをインストールします.
GPUドライバーを更新したり,eGPU(自分の時はGPD G1用にセットした時に再出しました)向けに改めてインストールした時にも発生するので,発生するようになったらやり直します.
皆さん,こんにちは.HAVRMです.
今回も予約購入で販売日当日(2025/9/19)に手に入れ,仕事が終わった後にデータコピーを行い,翌日(2025/9/20)に東京スカイツリーに行ってiPhone同士のカメラ比較を行いました.天気はあまりよくなく,下側の展望デッキが雲に隠れたりしていましたが,どうにか撮影を行いました.実際どのようにカメラ性能が上がったか比べていきたいと思います.なお夜間撮影時は風が強かったこと,三脚を使わず手持ちで撮影を行ったことにより,少しぶれていることがありますが,ご了承ください.なお,iPhone 17シリーズのカメラについては次のブログにまとめています.
havrm.hatenablog.com
なお,両方iOS26.0にアップデートしたうえでHEICフォーマットの48MPに設定したうえで撮影しています.ただしiPhone側が自動的にそれ以下に解像度を減らす場合もあります.撮影場所は他の比較写真と同じ柳島歩道橋となります.
※ブログの内容上,画像は高画質でアップロードしています.ネットワークを結構使うと思うので通信量に制限のある人は気を付けてください.
また実際に各場合での写真を載せているので,ページがとても長くなっています.結論の項目は簡潔に書いているので,とりあえず簡単に知りたい方は下の目次から結論に移動してください.
※2025/10/5追記:月の撮影について追記しました.
iPhoneからはHEICフォーマットで出力し,Windows 11 Home 24H2のペイントでJPEGとして保存しなおしたものを掲示しています.並べた画像はペイントで抜き出し,貼り付け等行いJPEGとして出力したものになります.
まずはカタログスペックの比較から行います.
| iPhone 15 Pro Max | iPhone 17 Pro | |
|---|---|---|
| 解像度 | 48MP | 48MP |
| 焦点距離 | 24mm | 24mm |
| F値(絞り値) | f/1.78 | f/1.78 |
| 画素サイズ | 1.22μm? | 1μm |
| ピント調整 | 100% フォーカスピクセル | 100% フォーカスピクセル |
| 手振れ防止 | センサーシフト光学式 | センサーシフト光学式 |


ISOの値が違いますが,これは撮影時の露光調整の微妙な違いによるものだと思います.実際に展望デッキ付近を拡大してみても大きな差はないです.

まずはナイトモードをオフにした状態の比較を行います.ナイトモードオフの場合,露光時間は短く(1s 未満)になります.その分ISOを上げることで撮影を行います.


雲があるせいで純粋な比較はしにくいですが,iPhone 15 Pro Maxの方が明るくするためにISO感度を1000まで上げているためよく見ると高感度ノイズが目立ちます.
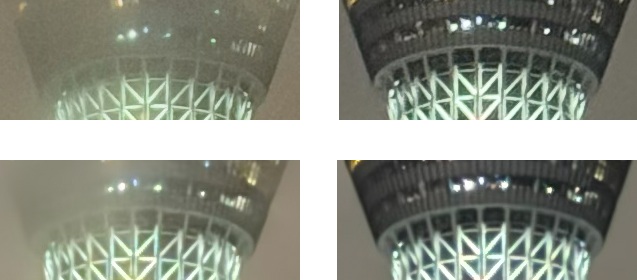
次にナイトモードをオンにした状態の比較を行います.ナイトモードをオンにすると長時間露光をするため,感度を抑えて撮影ができます.またクアッドピクセルを使う(4つのピクセルを1ピクセルとして扱う → ピクセルサイズの拡大 = 感度の向上)ため,画素数は落ちるものの,感度を上げた際の高感度ノイズの発生が低減されます.


それぞれの画像の展望デッキ下部を拡大して比較するとこのような感じになります.

ナイトモードオンの写真については2倍に拡大しています.下の方が画素数が少ないため,荒っぽく見えます.一方でiPhone 15 Pro Maxの方でわかりやすいですが,ナイトモードオンの時のほうが高感度ノイズが目立たないことがわかります.これはISOが同じでもセンサ自体の感度が上がったため,ノイズが弱くなったためと考えられます.iPhone 17 Proの方はそもそもノイズが出てないので差があまりわからないですね.
2倍の時はメインカメラを利用しています.中央の1/4のエリアで撮影することで2倍ズーム(=デジタルズーム・トリミング・クロップ)を行います


展望デッキを拡大して比較した画像が下のものですが,やはり大きな差はなさそうですね.

まずはナイトモードをオフにした状態での比較です.


撮影時の状況が違いすぎるので比較はしにくいですが,雲の影響を考慮すれば写り方に大きな違いはなさそうです.
次にナイトモードをオンにした状態での比較です.


これも写り方に大きく差がないように見えます.実際に展望デッキの下部を拡大して比較するとこのようになります.
添付した画像からだとわかりにくいのですが,ナイトモードがオンの場合,展望デッキ下部の柱の解像度が粗くなっています(詳しくいうと同じ色の画像が4個セットになっています).実際に拡大した画像は下の通りです.

おそらくクアッドピクセルを使って撮影し,高画質化をしたのではないでしょうか.この際,明暗がはっきりと出ている場所はその画素のエッジを残したまま画素数を増やしたものと思われます.なお,高感度ノイズについてはやはりナイトモードを使ったほうがきれいになっています.
まずはカタログスペックの比較から行います.
| iPhone 15 Pro Max | iPhone 17 Pro | |
|---|---|---|
| 解像度 | 12MP | 48MP |
| 焦点距離 | 13mm | 13mm |
| F値(絞り値) | f/2.2 | f/2.2 |
| 画素サイズ | 1.4μm | 0.7μm |
| ピント調整 | 100% フォーカスピクセル | ハイブリッドフォーカスピクセル |


カメラの公称値と実際の画像に記録された焦点距離に差ができていますが,手振れ防止機能でも効いているのでしょうか?
とりあえず,日中であれば画素数にそもそも差があるため,iPhone 17 Proの方がきれいに撮れます.実際に展望デッキを拡大するとこのようになります.

まずはナイトモードをオフにした状態での比較です.


こちらも解像度の違いから細かさが大分違います.一方でiPhone 17 Proの方がISO値が低いのにiPhone 15 Pro Maxより高感度ノイズがはっきり出ています.これは解像度による影響もあるとは思いますが,センサ自体の感度がピクセルサイズの差によって大きな差が生まれているからだと考えられます.
次にナイトモードをオンにした状態での比較です.


こちらは雲の違いを考えると大きな差がないと感じます.iPhone 17 Proでは高感度ノイズが低減された一方,画素数が落ちているのがわかります.実際に展望デッキの下部を拡大して比較するとこのようになります.

これを見てもiPhone 17 Proのナイトモードオフの時の写真だけ,解像度が高く,それ以外は高感度ノイズが少ないことがわかります.
ちょうど手元にあったiPhone 7の画面の壁紙を至近距離から撮影しました.壁紙は下の写真をiPhoneの画面サイズにトリミングしたものです.
pixta.jp
なおiPhone 17 Proでの写真は14MBと大きく,サイト上限の10MBを超過しているので,iPhone 17 Proでの写真は縦横半分にしたうえで掲載します.写真情報は元の写真データを提示します.


元の写真を見てもこのレベルでは違いが判りません.真ん中のカエデと空の境目付近を拡大すると下のようになります.

こうやって見ると画面の画素がはっきりと映っているiPhone 17 Proの方がしっかり写っていることがわかります.
カメラの前に手を置き,前面のToFセンサに至近距離の判定をさせ,超広角カメラに切り替えられた状態で,奥のスカイツリーにピントを合わせています.ただ,その困難さ故に日中での比較しか行いません.なおこの条件の都合上画面の端に指が映り込んでいますが気にしないでください.


さすがに画質が劣化しているように見えます.実際にメインカメラで撮影した時のものと比較してみるとこのようになります.

メインカメラでは48MPで撮影できる一方で,超広角カメラを使うとiPhone 17 Proの場合12MP,iPhone 15 Pro Maxの場合3MPになるため,その文画質が悪化します.ただ,iPhone 15 Pro Maxの場合は超広角カメラでの撮影時,高画質化の処理が行われているため,一見iPhone 15 Pro Maxの方がきれいに見えます.ただ,よく見ると線が歪んでいたり,縁が二重になっていたりするがわかります.なので実際に撮影を行いう際はなるべくメインカメラで撮るようにしたほうがとてもきれいに撮れるので使う際は注意しましょう.
まずはカタログスペックの比較から行います.
| iPhone 15 Pro Max | iPhone 17 Pro | |
|---|---|---|
| 解像度 | 12MP | 48MP |
| 焦点距離 | 120mm | 100mm |
| F値(絞り値) | f/2.8 | f/2.8 |
| 画素サイズ | 1.12μm | 0.7μm |
| ピント調整 | 100% フォーカスピクセル | ハイブリッドフォーカスピクセル |
| 手振れ防止 | 3Dセンサーシフト光学式 | 3Dセンサーシフト光学式 |
iPhone 17 Proでは4倍(100mm)と8倍(200mm),40倍(1049mm),iPhone 15 Pro Maxでは5倍(120mm),25倍(667mm)とで比較します.
ここでは機種ごとにまとめて載せていきます.まずはiPhone 17 Proです.



次にiPhone 15 Pro Maxです.


iPhone 17 Proでは写真の時点で結構拡大したものが撮影できます.実際に展望デッキ上部の避雷針?を拡大してみると次のようになります.

やはり高解像度になったため,iPhone 15 Pro Maxでは5倍ズーム時に避雷針?でピクセルが見えちゃっていますし,25倍ズーム時は線がぐにゃぐにゃと歪んでいます.一方iPhone 17 Proでは度の画像も大きな差はなさそうです.4倍の時より8倍の方がくっきり見えているのはおそらく,ピントが避雷針?か展望デッキの他の場所になったかの違いで,ピントが少しずれたためと思われます.40倍ズームの時は少し線がゆがんでいるかなという感じです.これからわかるのは,ピント調整の正確さはともかく,映り方は倍率に依らないということです.
以前,別の記事で一眼レフカメラ D780でレンズを変えながら撮影したものがあるので,それと比較してみると,やはり,iPhone 17 Proの望遠レンズでも300mmのレンズでの撮影にはかないません.

この時のカメラはD780なので,画素数は24MPになります.いくらiPhone 17 Proの望遠カメラの画素数がいいといっても48MPであり,8倍ズーム(200mm)時だと12MP分しか撮影に使用できません.一眼レフの場合それよりの望遠レンズの300mmを使ったうえで24MPの解像度で撮影できると考えれば,この差は当然です.だからこそ,Appleが主張している「プロ用レンズに匹敵する」は,そんなわけがないのです.最近のレフカメラは24MP以上が標準(Nikonで言えば2013年発売のD7100は24MPになっています)ですし,ハイグレード品になると48MPに迫る画素数(Nikon Z9なら45.7MP)を持っています.プロ用のカメラはレンズを交換,もしくはズームレンズを使って光学的(光学品質ではなく,レンズの距離の変更による)に倍率を変えるので,好きな倍率で最高画質で撮影できます(センササイズによる影響もありますが...).それなのに「プロ用レンズに匹敵する」といいながら内部ではデジタルズームをしているだけなのは詭弁,なんならだましているのと同じです.「光学品質」とかいう言葉でごまかすぐらいなら正直に説明したほうが,使う側も間違えずに使えると思います.
まずはナイトモードをオフにした状態での比較です.
iPhone 17 Proでの倍率が短い順で並べます.



次にiPhone 15 Pro Maxでの倍率が短い順で並べます.


こちらは日中同様,解像度の差がはっきりしています.また,ピクセルサイズは小さいですが,iPhone 17 Proの方が高感度ノイズも抑えられているように見えます.
次にナイトモードをオンにした状態での比較です.
iPhone 17 Proでの倍率が短い順で並べます.



次にiPhone 15 Pro Maxでの倍率が短い順で並べます.


見たところ,iPhone 17 Proの4倍ズームの時のみクアッドピクセルを使っていて,それ以外ではナイトモードのオンオフに関わらず同じようにピクセルを使っているように見えます.特にiPhone 17 Proの8倍ズームの時はよく映っており,柱の凹凸まで見えています.またiPhone 15 Pro Maxの方でも,25倍ズームの時の方がきれいに映っており,これはもしかしたら手振れ防止機能がうまく働いたからなのでしょうか?少し不明です.さすがに連続画像からピクセル1個分以下のズレを認識し,高解像度化しているとは思えないですし...
展望デッキ下の点光源周辺を拡大比較したものが下の画像です.

iPhoneは夜間に月を撮影する際,ピント調整や露光の不正確さからうまく月を撮れませんでした.特に満月の時は周囲の暗闇と月の明るさの差が激しく,以前記事に書いた通り,HDR処理の影響か,輪郭が変になっていました.

満月直前で,薄雲越しになりますが,撮影する機会があったのでiPhone 17 Proで撮影してみました.iOSは26.0.1になっています.

晴れの満月ではないので,きちんと比較できないですが,きちんとピントが合って輪郭も変にならずに撮影できています.高画質化の処理についても,月と認識して処理をかけているというより,他の写真と同じように処理していそうです.またiPhone 15 Pro MaxのようにLiDARセンサをごまかす必要もありませんでした.ただ,手振れ防止機能のせいか,シャッターを押した瞬間真ん中にあっても,取れた写真では端に移動していることが多く,手持ちで撮影は難しそうです.これを撮った時も塀にiPhoneの下を当てて,手振れが発生しないように注意しながら撮影していますが,やはり中心からずれてしまいました.また後日,晴れた満月の時に撮影して比較したいと思います(次の満月は10/7ですが天気が悪そうです...).
まずはカタログスペックの比較から行います.
| iPhone 15 Pro Max | iPhone 17 Pro | |
|---|---|---|
| 解像度 | 12MP | 18MP |
| 焦点距離 | 23mm | 20mm |
| F値(絞り値) | f/1.9 | f/1.9 |
| ピント調整 | フォーカスピクセル | フォーカスピクセル |
iPhone 17 Proでは20mm,iPhone 15 Pro Maxでは23mmとで比較します.なお,フロントカメラは画面上のボタンで拡大した際は両方30mmとなっていました.なお,撮影がとてもしにくいため,髪の毛が映り込んでいる場合があります...また左右反転設定を修正し忘れたため,画像がiPhone 17 ProとiPhone 15 Pro Maxとで右反転しています...


画角に対する画素数ではやはり同じようですが,写真としての綺麗さには差ができています.実際に展望デッキを拡大したものが下の画像です.

iPhone 15 Pro Maxの方が線が波打っていたり,高感度ノイズが出ているようにも見えます.
まずはナイトモードをオフにした状態での比較です.


次にナイトモードをオンにした状態での比較です.


これについてもiPhone 17 Proの方がiPhone 15 Pro Maxより明らかによくなっています.さすがにナイトモードを使ったほうがきれいですが,同じ条件下でははっきりと差が出ています.展望デッキを拡大したものが下のものになります.

ただ,iPhone 17 Proの場合,ナイトモード時は画素数が18MPから12MPに減らされています.そのため,展望デッキ外壁のパネルの隙間がiPhone 17 Proでナイトモード時にとらえきれていません.iPhone 15 Pro Maxでは薄っすらと映っているのでやはり画素数の問題でしょう.これがどのような処理をして減らしているのかはわからないですが,これのおかげでナイトモード時にきれいに撮れるのだとは思います.
設定やカメラによって画素数が変わるのでそれをまとめます.設定は画像フォーマットHEICで48MP指定時です.なお本ブログにないサイズもありますが,こちらは別途簡易的に撮影し確認しています.
メインカメラは選べる範囲が広いので別枠で行います.
| ナイトモード | メインカメラ | ||||||
|---|---|---|---|---|---|---|---|
| x1 24mm | x1.2 28mm | x1.5 35mm | x2 48mm | x4 100mm | x5 120mm | ||
| オフ | iPhone 17 Pro | 48MP | 35MP | 24MP*1 | 12MP | 12MP*2 | 12MP*3 |
| iPhone 15 Pro Max | |||||||
| オン | iPhone 17 Pro | 12MP | 12MP*4 | ||||
| iPhone 15 Pro Max | |||||||
| ナイト モード | 超広角カメラ | 望遠カメラ | フロントカメラ | ||||||
|---|---|---|---|---|---|---|---|---|---|
| x0.5 13mm | x1 24mm | x4 100mm | x5 120mm | x8 200mm | 20mm | 23mm | 30mm | ||
| オフ | iPhone 17 Pro | 48MP | 12MP | 48MP | 32MP | 12MP | 18MP | ✕ | 7MP |
| iPhone 15 Pro Max | 12MP | 12MP*5 | ✕ | 12MP | 12MP*6 | ✕ | 12MP | 7MP | |
| オン | iPhone 17 Pro | 12MP | ? | 12MP | 12MP*7 | 12MP | ✕ | 7MP | |
| iPhone 15 Pro Max | 12MP | ? | ✕ | 12MP | 12MP*8 | ✕ | 12MP | 7MP | |
iPhone 15 Pro MaxとiPhone 17 Proでは各カメラにおいて次のことが言えそうです.
ただ,星空・月撮影時は特殊環境になるため,これ以外でも差が出る可能性はあります.そこは撮影する機会があれば比較できるとは思います.
また,改めて比較の写真のみ添付します.簡単に確認してください.
いかがでしょうか.星・月を除けばしっかりと書ききったと思います.ただ,想像以上に文量が多くなってしまいました(3万字オーバー).分けて書いたほうが良かったかも.それもあってまとめた「結果」の項目を作ってみましたが,効果はあるのでしょうか...

")

 ブラック M-XT3DRBK")
")
{kind=link}